

iCore-3568JQ
产品规格书
前言
概述
本文档主要介绍基于 iCore-3568JQ 平台的开发方法。
OS 版本
| OS 名称 | 内核版本 | 支持情况 | 维护情况 |
|---|---|---|---|
| Linux | 4.19 | √ | 主要维护 |
| Android11.0 | 4.19 | √ | 主要维护 |
文档当前版本
| 当前版本 | |
|---|---|
| 文档名称 | iCore-3568JQ 开发手册 |
| 版本号 | V2.0.2 |
| 作者 | Firefly Team |
| 修改日期 | 2022-05-10 |
修订记录
-
V2.0.2
-
更新时间:2022-05-10
-
更新内容:
-
修改串口调试内容
-
修正部分下载链接。
-
-
-
V2.0.1
-
更新时间:2022-05-09
-
更新内容:
-
增加《修订记录》
-
-
上手教程
1. 介绍
iCore-3568JQ板载 RK3568J 四核 64 位工业级处理器,支持 8GB 大内存;支持 WiFi6,5G/4G 等高速无线网络通讯;采用了 BTB 接口,传输能力更强; 拥有工业级的稳定性,在 -40°C 至 85°C 工作温度下可长时间稳定运行;提供底板参考设计资料,用户可自主深度化定制
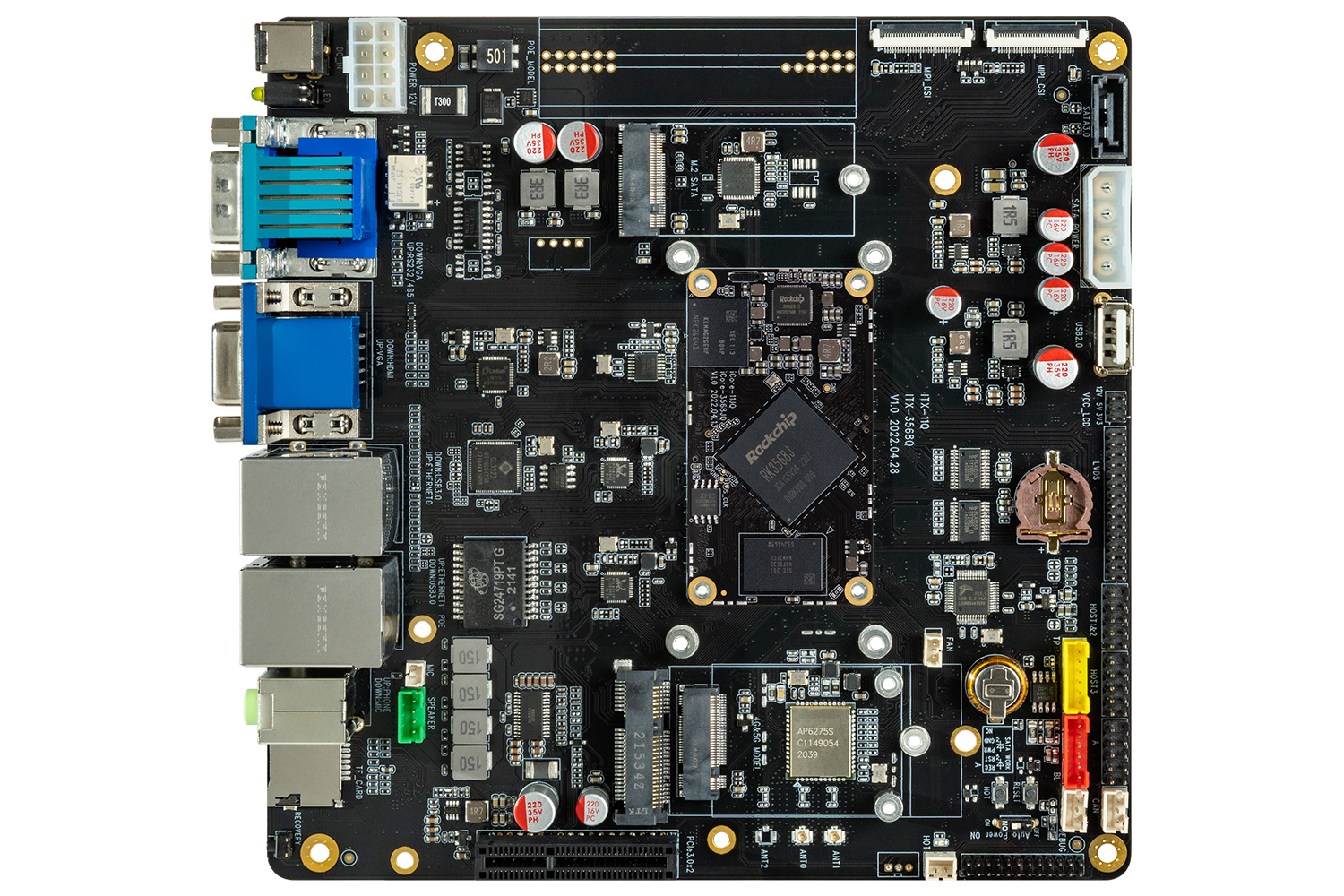
ITX-3568Q开发板由核心板 iCore-3568JQ 加底板组成, 标准 ITX 主板尺寸,标准的接口规范,可适配通用的ITX电脑机箱。提供丰富的拓展接口,让用户在创造时能有更大的想象空间
1.1. ITX-3568Q 标准套装包含以下配件(仅供参考):
-
iCore-3568JQ 核心板一块
-
12V-3A电源适配器一个
-
ITX-3568Q 底板一块
-
散热风扇
-
SATA 电源线(1分5)和数据线
-
HDMI-2.0 4K 数据线
-
铜管天线 x2
-
双公头 USB 线一条
另外可以选购的配件有:
-
Firefly 串口模块
另外,在使用过程中,你可能需要以下配件:
-
显示设备
-
带 HDMI 接口的显示器或电视,及 HDMI 连接线
-
-
网络
-
100M/1000M 以太网线缆,及有线路由器
-
WiFi 路由器
-
-
输入设备
-
USB 无线/有线的鼠标/键盘
-
红外遥控器(需要接上红外接收器)
-
-
升级固件,调试
-
双公头 USB 数据线
-
串口转 USB 适配器
-
2. 串口调试
如果正在进行 U-Boot 或内核开发,USB 串口适配器( USB 转串口 TTL 适配器的简称)对于检查系统启动日志非常有用,特别是在没有图形桌面显示的情况下。
2.1. 选购适配器
网店上有许多 USB 转串口的适配器,按芯片来分,有以下几种:
| 串口 | 最高波特率 | 是否推荐 | 评价 | 购买链接 |
|---|---|---|---|---|
| CP2104 | 2Mbps | 推荐 | 支持高波特率通信,稳定性好耐用 | 点击购买 |
| CH340 | 2Mbps | 不推荐 | firefly和许多客户在实际使用中发现,市面上很多CH340的实际波特率达不到1.5Mbps,这给开发过程造成很多麻烦 | |
| PL2303 | 1.2Mbps | 不推荐 | 最高波特率达不到1.5Mbps |
注意: ITX-3568Q 默认的波特率是 1500000,有些USB转串口芯片波特率无法达到 1500000,同一芯片的不同系列也可能会有差异,所以在选购之前一定要确认是否支持。
2.2. 硬件连接
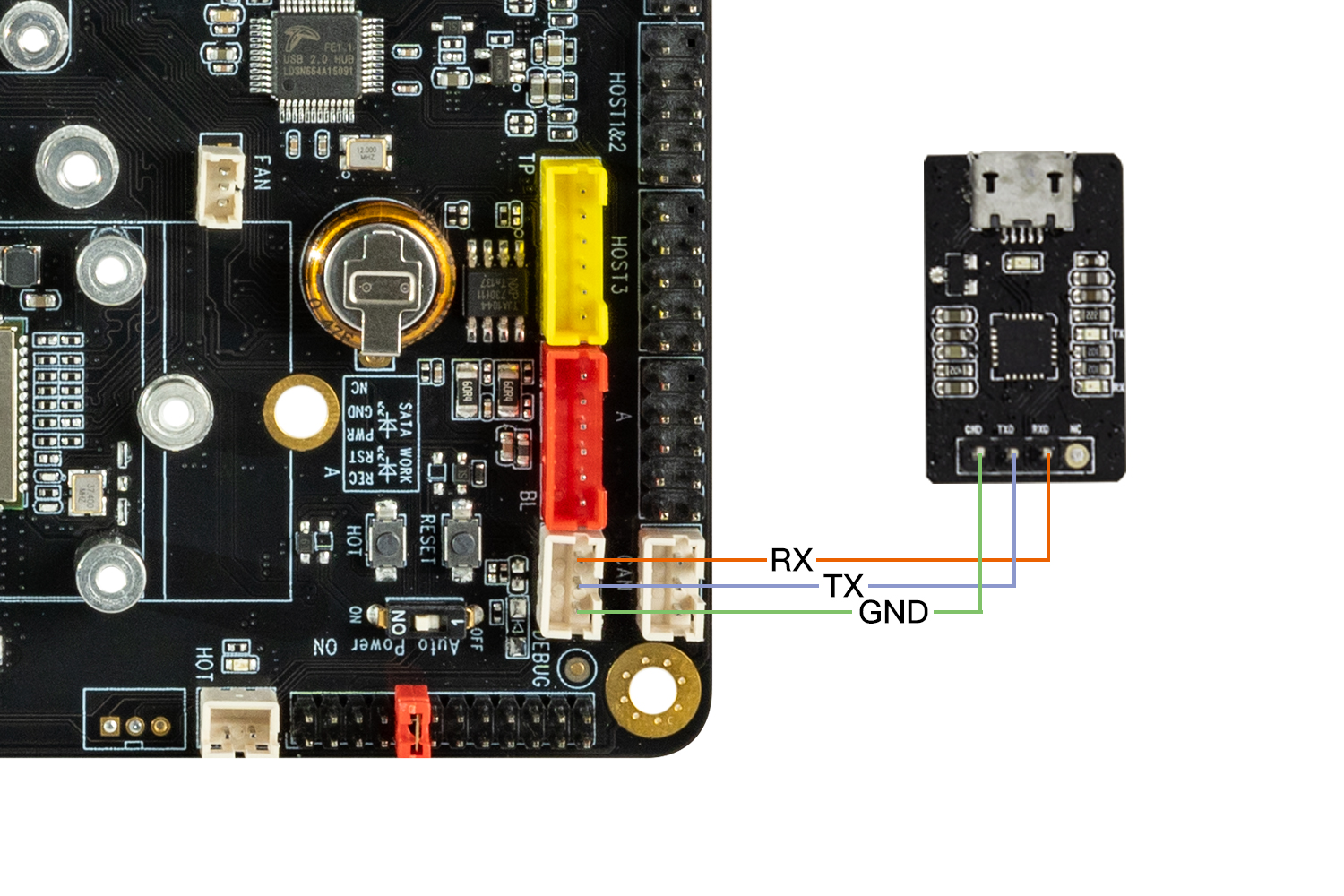
串口转 USB 适配器,有四个引脚:
-
3.3V 电源(NC),不需要连接
-
GND,串口的地线,接开发板串口的 GND 针
-
TXD,串口的输出线,接开发板串口的 TX 针
-
RXD,串口的输入线,接开发板串口的 RX 针
注意: 如使用其它串口适配器遇到 TX 和 RX 不能输入和输出的问题,可以尝试对调 TX 和 RX 的连接。
ITX-3568Q 串口连接图:
2.3. 串口参数配置
ITX-3568Q 使用以下串口参数:
-
波特率:1500000
-
数据位:8
-
停止位:1
-
奇偶校验:无
-
流控:无
2.4. Windows 上使用串口调试
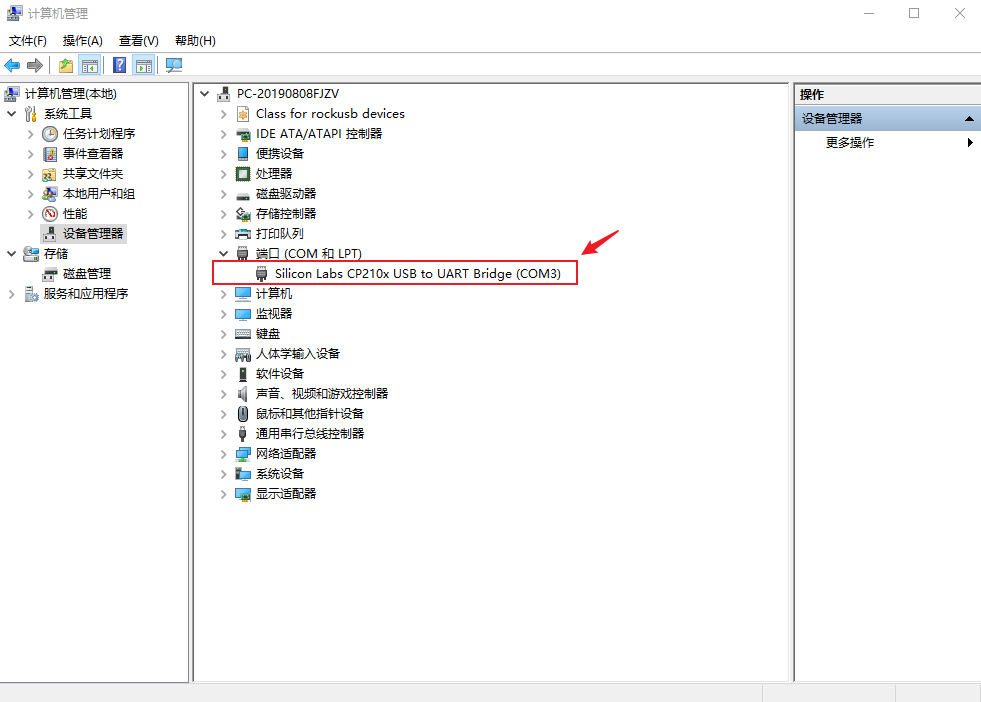
2.4.1. 安装驱动
下载驱动并安装:
如果在 Win8 上不能正常使用 PL2303,参考这篇文章, 采用 3.3.5.122 或更老版本的旧驱动即可。
如果在 Windows 系统上安装官网的 CP210X 驱动,使用 PUTTY 或 SecureCRT 等工具设置串口波特率为 1500000,如果出现设置不了或无效的问题,可以下载旧版本驱动。
插入适配器后,系统会提示发现新硬件,并初始化,之后可以在设备管理器找到对应的 COM 口:
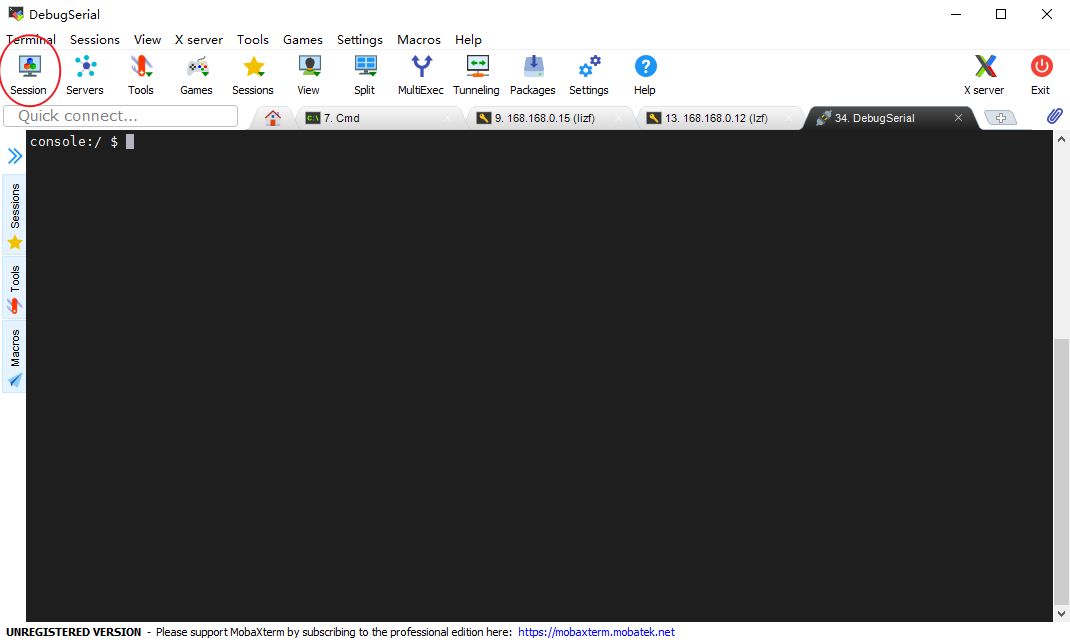
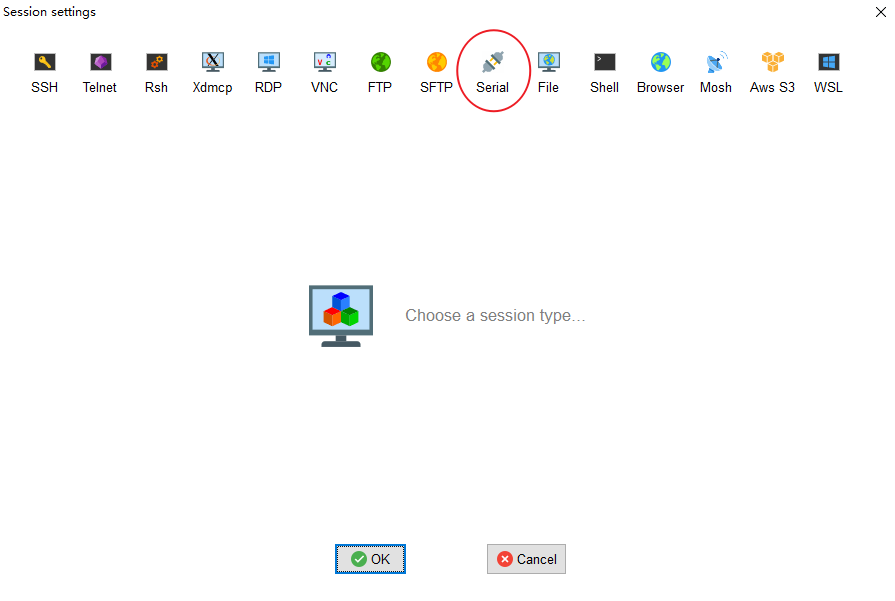
2.4.2. 安装软件
Windows 上一般用 putty 或 SecureCRT。其中我们推荐使用 MobaXterm 免费版本。这是一款功能强大的终端软件,在这里介绍一下,MobaXterm 的使用方法与之类似。
到这里下载 MobaXterm:
-
选择 session 为 Serial。
-
将 Serial port 修改为在设备管理器中找到的 COM 端口。
-
设置 Speed (bsp) 为 1500000。
-
点击 OK 按钮。
2.5. Ubuntu 上使用串口调试
在 Ubuntu 上可以有多种选择:
-
minicom
-
picocom
-
kermit
篇幅关系,以下就介绍 minicom 的使用。
2.5.1. 安装 minicom

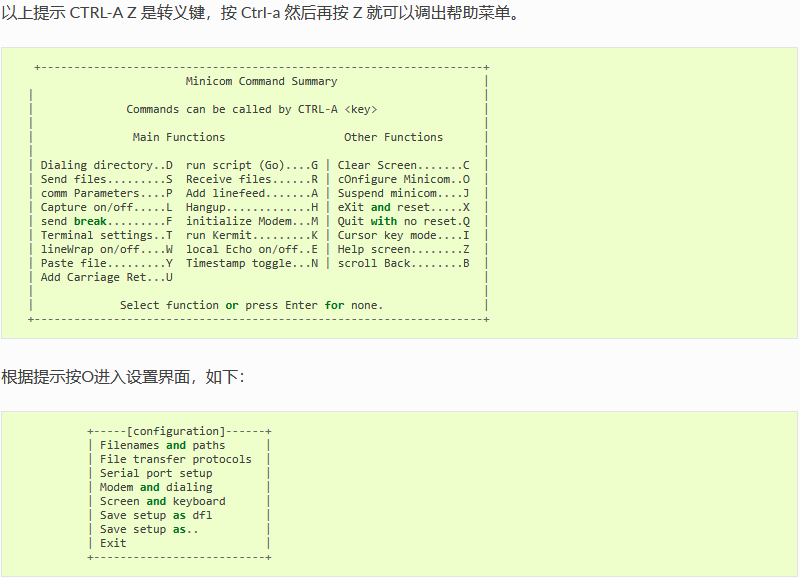
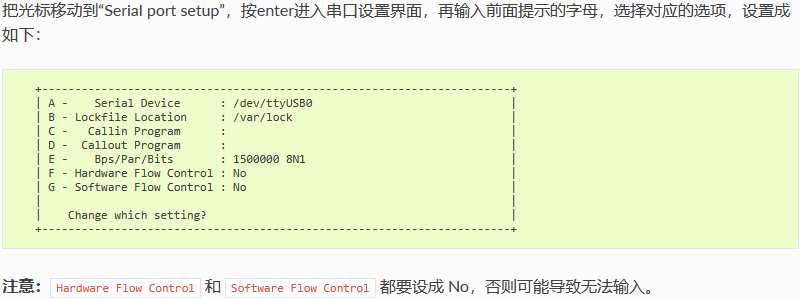
设置完成后回到上一菜单,选择 Save setup as dfl 即可保存为默认配置,以后将默认使用该配置。
升级固件
1. 更新固件介绍
1.1. 前言
ITX-3568Q 有2种工作模式。一般情况下,开机直接进入Normal 模式正常启动系统。如需对板子系统进行升级,可以根据情况选择合适的升级模式进行固件升级。
-
注意:ITX-3568Q低内存版本出厂默认安装 Ubuntu 操作系统,高内存版本默认安装 Android 操作系统。如果用户要运行其他操作系统,需要使用对应的固件烧写到主板。可以前往固件下载页面下载更多固件。
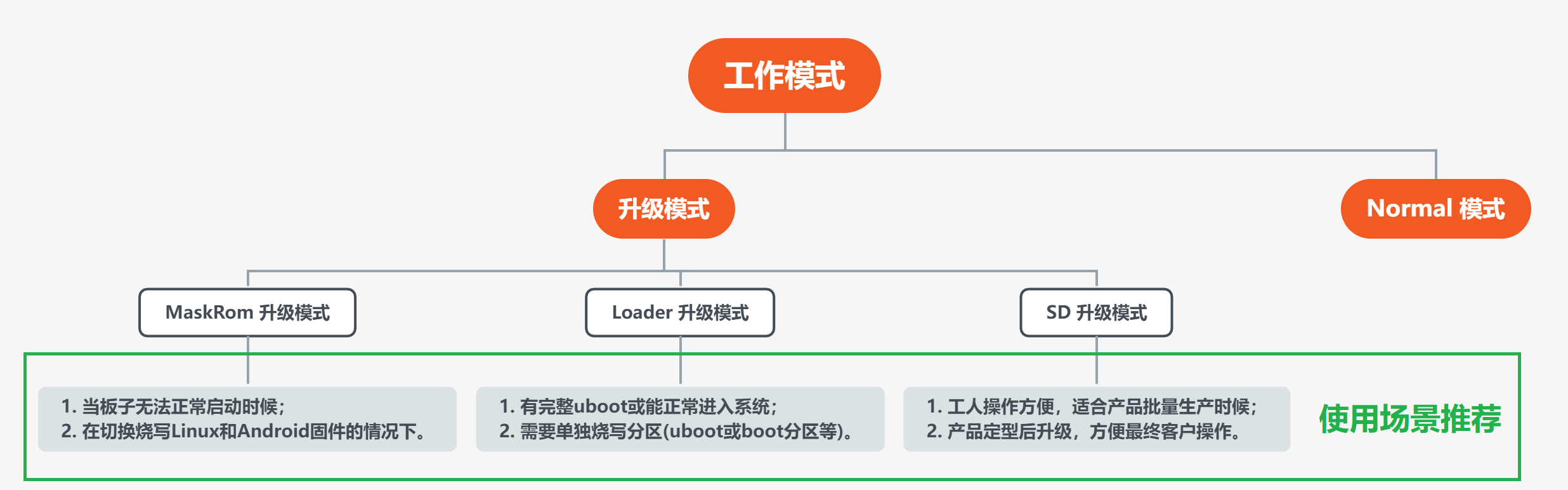
ITX-3568Q按工作模式进行分类,可以分为二种工作模式:
1.2. Normal 模式
| 工作模式 | Normal 模式 | 升级模式 |
|---|---|---|
| 启动介质 | eMMC 接口/SDMMC 接口 | |
| 描述 | Normal 模式就是正常的启动过程, 各个组件依次加载,正常进入系统。 |
目前支持3种升级模式,各有优缺点: 1. MaskRom 升级模式 2. Loader 升级模式 3. SD 升级模式 |
1.3. 升级模式
其中升级模式中,不同升级模式之间的对比:
| 升级模式 | MaskRom 升级模式 | Loader 升级模式 | SD 升级模式 |
|---|---|---|---|
| 简单描述 | 1. 使用USB线将主板连接到电脑上; 2. 硬件操作使板子进入升级模式; 3. 在PC上使用USB升级单板固件。 |
1. 使用USB线将主板连接到电脑上; 2. 软件或按键操作使板子进入升级模式; 3. 在PC上使用USB升级单板固件。 |
1.通过升级卡制作工具,将MicroSD卡制作为升级卡; 2. 将升级卡插入主板,上电开机,机器自动执行升级。 |
| 连接方式 | USB | USB | TF卡(少数为SD卡槽) |
| 升级工具 Windows PC Linux PC |
Windows 上升级固件 Linux 上升级固件 |
Windows 上升级固件 Linux 上升级固件 |
Windows 上制作升级卡 不支持 |
| 进入方法 | 需要硬件操作 | 按键或软件进入 | 上电直接进入 |
| 使用条件 | 硬件操作进入 | 能正常使用uboot | 无 |
| 使用场景推荐 | 1. 当板子无法正常启动时候; 2. 在切换烧写Linux和Android固件的情况下。 |
1. 有完整uboot或能正常进入系统; 2. 需要单独烧写分区(uboot或boot分区等)。 |
1. 工人操作方便,适合产品批量生产时候; 2. 产品定型后升级,方便最终客户操作。 |
| 优点 | 1. 最基本的烧写方式; 2. 非固件和硬件问题,一般都能成功烧写; 3. 不需要uboot支持,拯救变砖的单板; 4. 支持跨系统升级(Linux和安卓等)。 |
1. 烧写效果MaskRom 升级模式差不多; 2. 能单独烧写分区; 3. 进入loader模式方便。 |
1. 操作方便,只需插卡启动; 2.集合了MaskRom 升级模式的优点。 |
| 缺点 | 1. 进入方式麻烦,不适难拆除外壳的产品; 2. 烧写分区表麻烦,较难单独烧写分区; 3. 需要完全擦除设备再烧写。 |
1. 需要完整的loader(通常指uboot); 2. 跨系统升级需要完全擦除设备再烧写。 |
1. 需要合成完整固件。 |
1.3.1. MaskRom 升级模式
一般情况下是不用进入 MaskRom 升级模式的,只有在 bootloader 校验失败(读取不了 IDB 块,或 bootloader 损坏) 的情况下,BootRom 代码 就会进入此模式。此时 BootRom 代码等待主机通过 USB 接口传送 bootloader 代码,加载并运行之。当板子变砖无法正常启动或升级程序时,也可以手动进入MaskRom 升级模式.
要强行进入 MaskRom 升级模式,请参阅《MaskRom 升级模式》一章。
1.3.2. Loader 升级模式
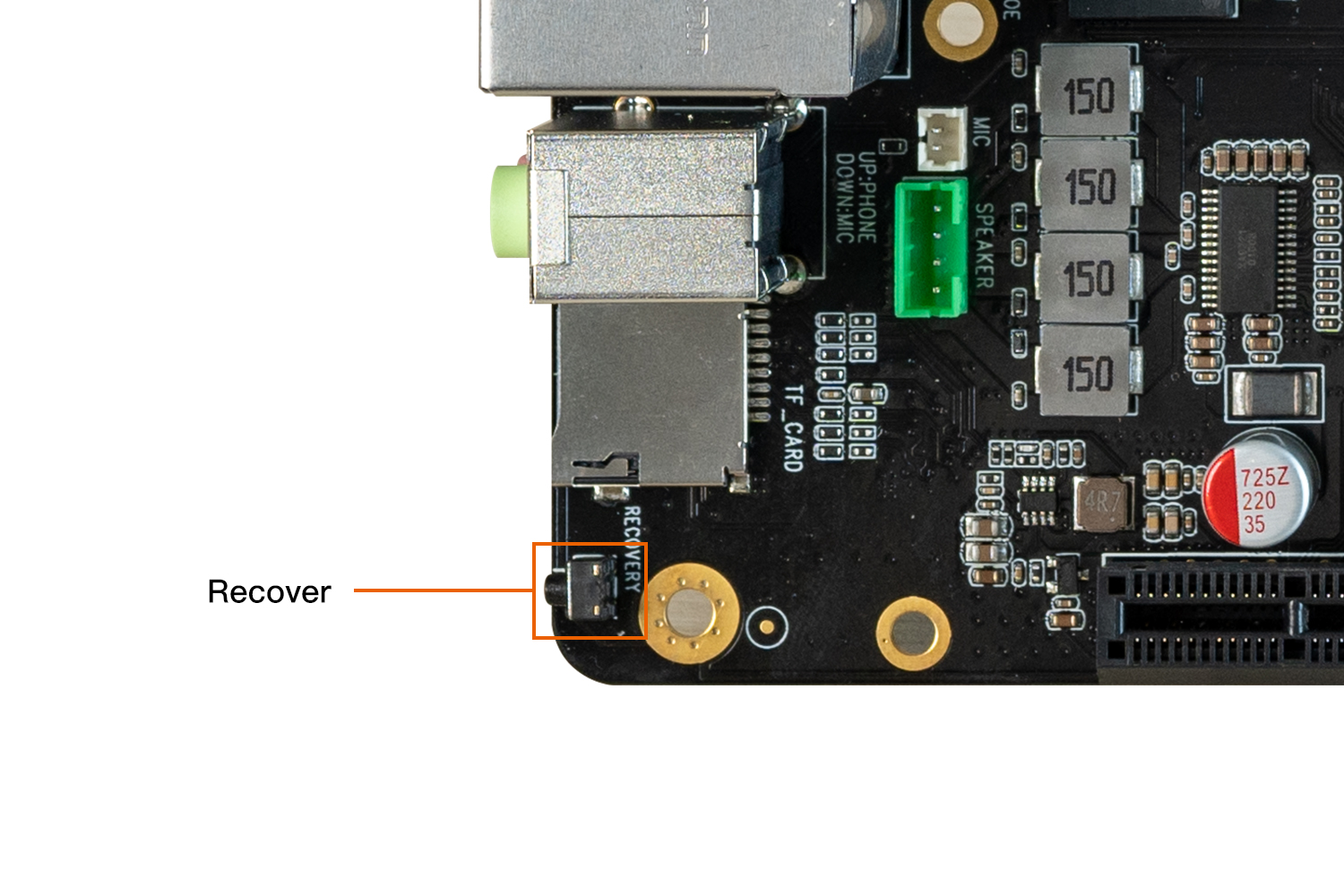
在 Loader 升级模式下,bootloader 会进入升级状态,等待主机命令,用于固件升级等。要进入此模式,必须让 bootloader 在启动时检测到 RECOVERY(恢复)键按下,且 USB 处于连接状态。
要强行进入 Loader 升级模式,请参阅《Loader 升级模式》一章。
2. 使用USB线缆升级固件
2.1. 前言
本文介绍了如何将主机上的固件,通过双公头USB数据线烧录到 iCore-3568JQ 开发板的存储器中。升级时,需要根据主机操作系统和固件类型来选择合适的升级方式。
2.2. 准备工具
-
ITX-3568Q 开发板
-
主机
-
良好的双公头USB数据线
2.3. 准备固件
固件可以通过编译SDK获得,也可以通过资源下载处下载公版固件(统一固件)。固件文件一般有两种:
-
单个统一固件
统一固件是由分区表、bootloader、uboot、kernel、system等所有文件打包合并成的单个文件。Firefly正式发布的固件都是采用统一固件格式,升级统一固件将会更新主板上所有分区的数据和分区表,并且擦除主板上所有数据。
-
多个分区镜像
即各个功能独立的文件,如分区表、bootloader、kernel等,在开发阶段生成。独立分区镜像可以只更新指定的分区,而保持其它分区数据不被破坏,在开发过程中会很方便调试。
通过统一固件解包/打包工具,可以把统一固件解包为多个分区镜像,也可以将多个分区镜像合并为一个统一固件。
2.4. 安装烧写工具
2.4.1. Windows操作系统
-
安装RK USB驱动
下载 Release_DriverAssistant.zip,解压,然后运行里面的 DriverInstall.exe 。为了所有设备都使用更新的驱动,请先选择驱动卸载,然后再选择驱动安装。
-
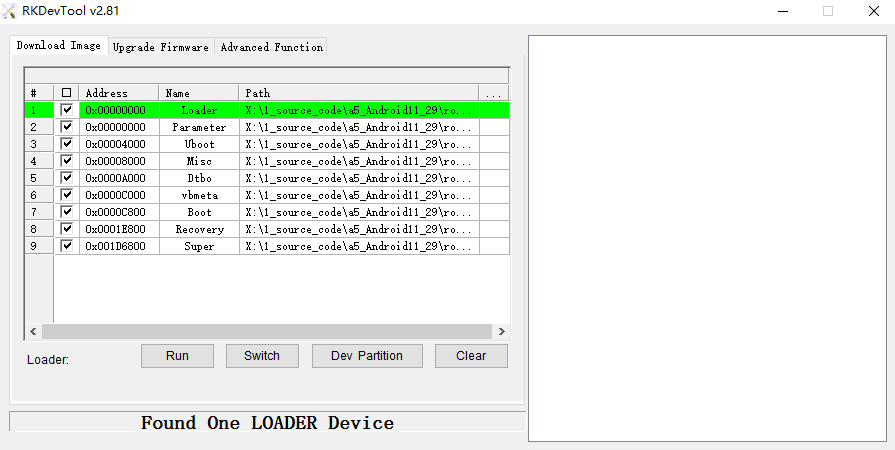
运行AndroidTool的RKDevTool.exe
为避免由下载工具版本引起的烧写问题,推荐使用公版固件压缩包内部打包好的工具进行烧写,例如安卓公版固件压缩包解压后如下:

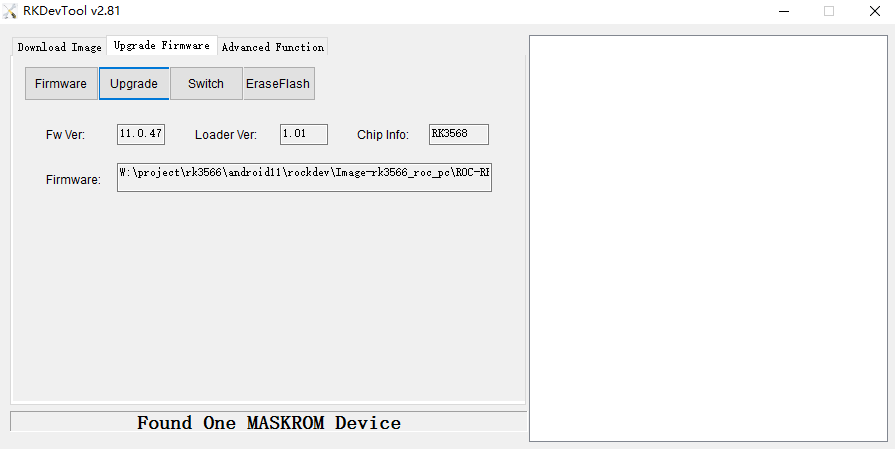
也可以单独下载 AndroidTool,解压,运行 RKDevTool_Release_v2.xx 目录里面的 RKDevTool.exe(注意,如果是 Windows 7/8,需要按鼠标右键,选择以管理员身份运行),如下图:
2.4.2. Linux操作系统
Linux 下无须安装设备驱动
下载 Linux_Upgrade_Tool, 并按以下方法安装到系统中,方便调用:

下载 Linux_adb_fastboot, 并按以下方法安装到系统中,方便调用:
2.5. 进入升级模式
通常我们升级固件的模式有两种,分别是Loader模式和MaskRom模式。烧写固件前,我们需要连接好设备,并让板子进入到可升级模式。
2.5.1. Loader模式
2.5.1.1. 硬件方式进入Loader模式
连接设备并通过RECOVERY按键进入Loader升级模式步骤如下:
-
先断开电源适配器连接
-
双公头 USB 数据线一端连接主机,一端连接开发板
-
-
按住设备上的 RECOVERY (恢复)键并保持
-
-
接上电源
-
大约两秒钟后,松开 RECOVERY 键
2.5.1.2. 软件方式进入Loader模式
双公头USB数据线接好后在串口调试终端或adb shell给板子运行以下命令

2.5.1.3. 查看Loader模式
如何确定板子是否进入Loader模式,我们可以通过工具去查看
Windows操作系统
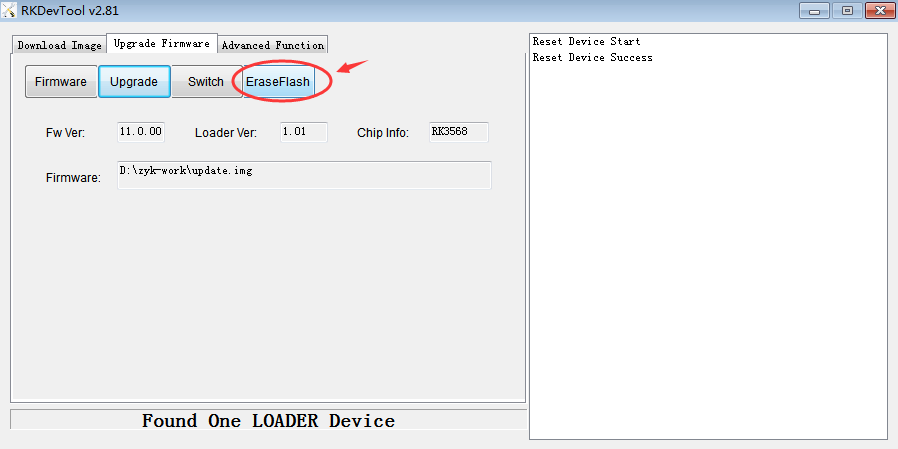
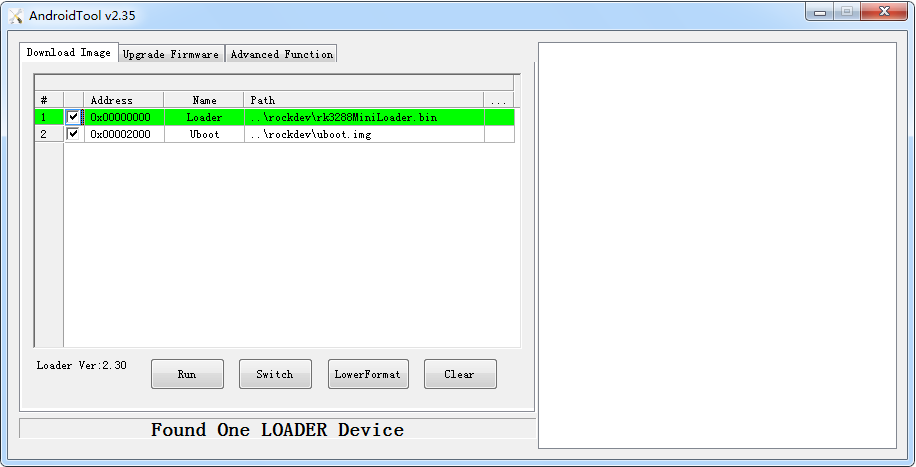
通过AndroidTool工具可以看到下方提示Found One LOADER Device
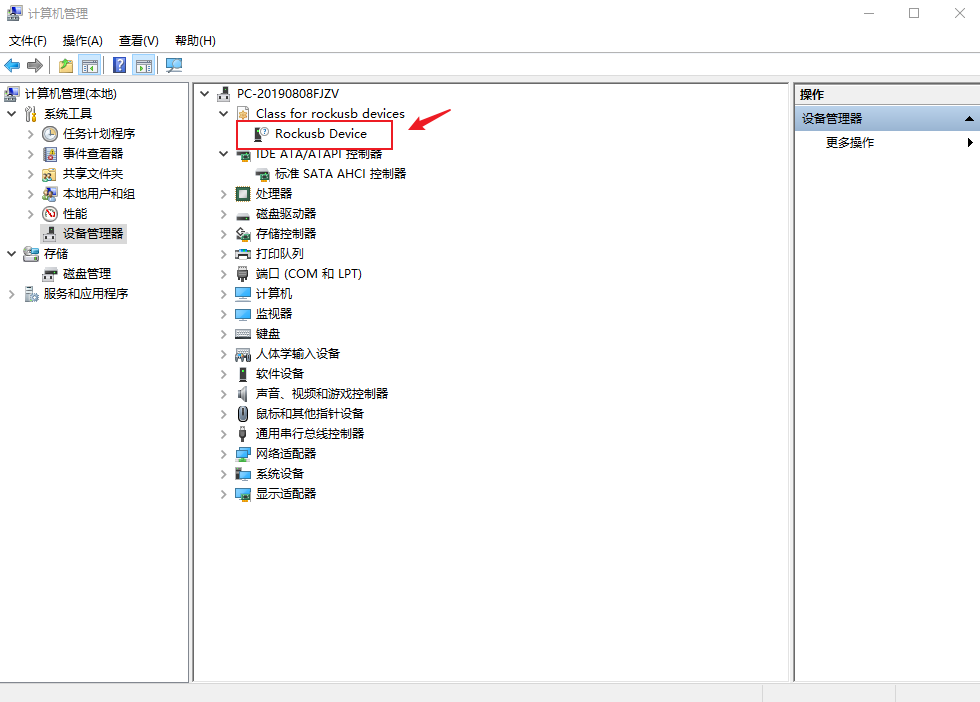
如果有进行”进入Loader模式”的操作,仍旧没有看到烧写工具提示LOADER,此时可以可以看一下Windows主机是否有提示发现新硬件并配置驱动。打开设备管理器,会见到新设备 Rockusb Device 出现,如下图。如果没有,可返回上一步重新安装驱动。
Linux操作系统
运行upgrade_tool后可以看到连接设备中有个Loader的提示

2.5.2. MaskRom模式
进入MaskRom模式的方法,请参考《MaskRom模式》
MaskRom烧写固件前先确定板子ITX-3568Q是否有贴Nor Flash存储器,如下图:
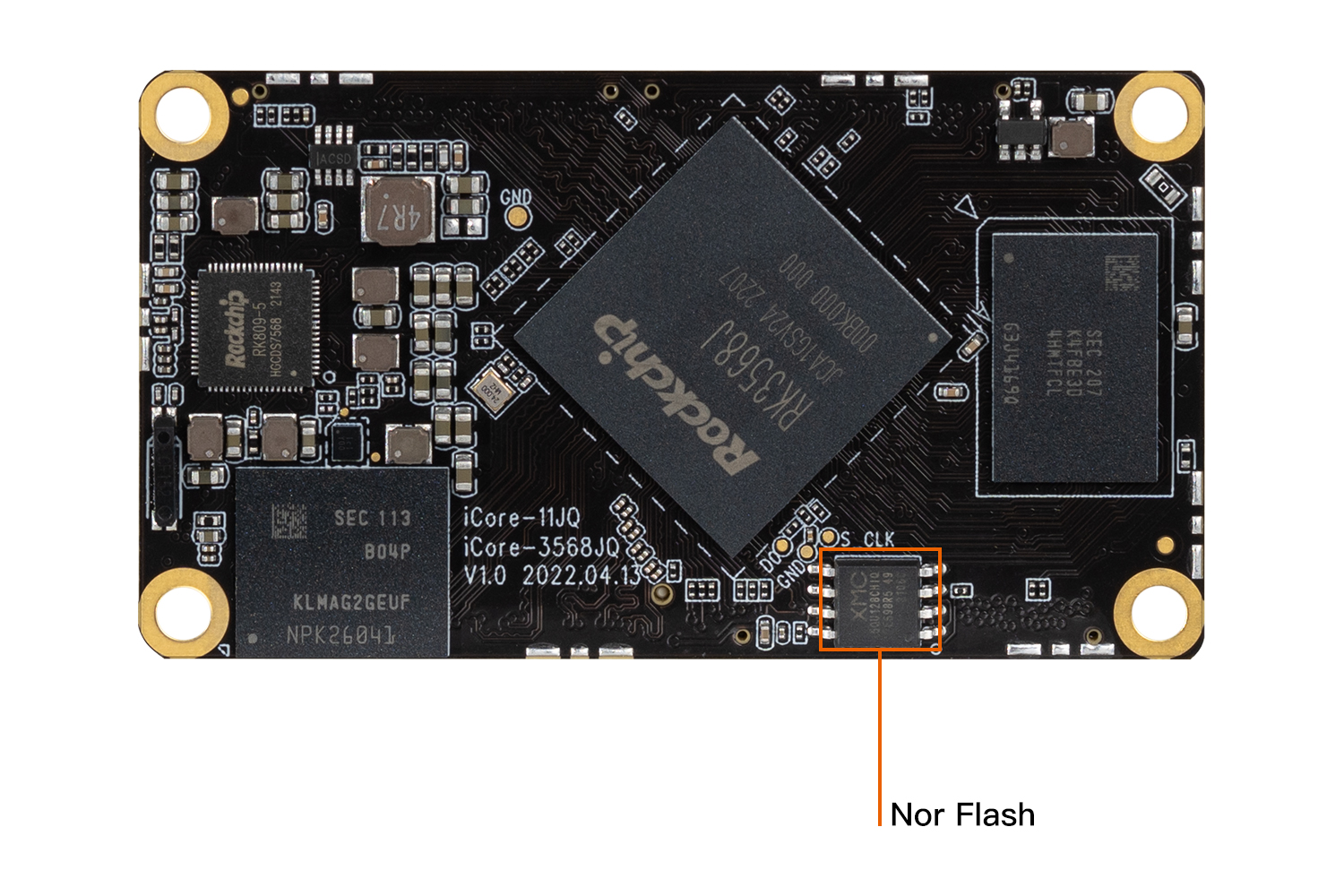
如果有贴Nor Flash请参考切换升级存储器章节烧写统一固件,没有贴Nor Flash可按以下步骤继续操作
2.6. 烧写固件
注意:Linux SDK v1.2.4a 及之后版本采用 extboot,烧写内核请使用 extboot.img 取代后文中所有的 boot.img(仅限 Linux,Android 请无视)
如何查看版本:
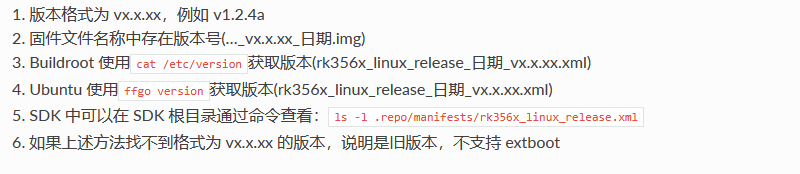
不要将 extboot.img 烧录进旧版本固件!
除此之外,extboot ubuntu 还支持以安装包的形式更新内核,详情查看Ubuntu 使用手册
2.6.1. windows操作系统
2.6.1.1. 烧写统一固件 update.img
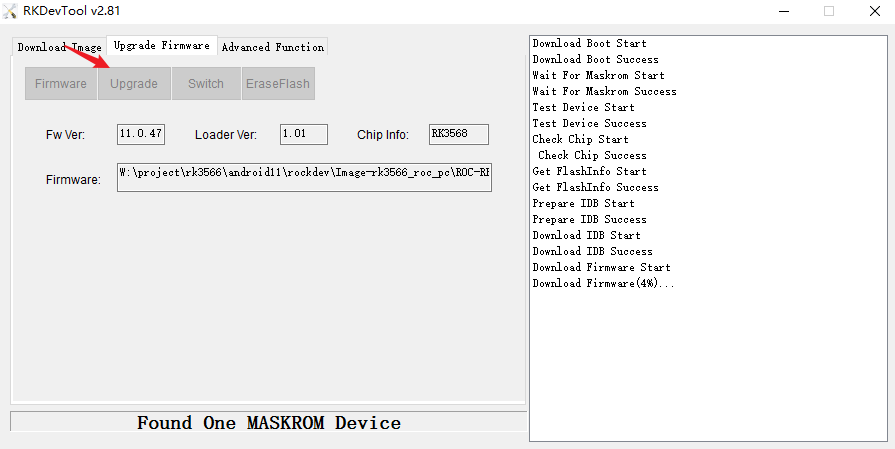
烧写统一固件 update.img 的步骤如下:
-
切换至Upgrade Firmware页。
-
按Firmware按钮,打开要升级的固件文件。升级工具会显示详细的固件信息。
-
按Upgrade按钮开始升级。
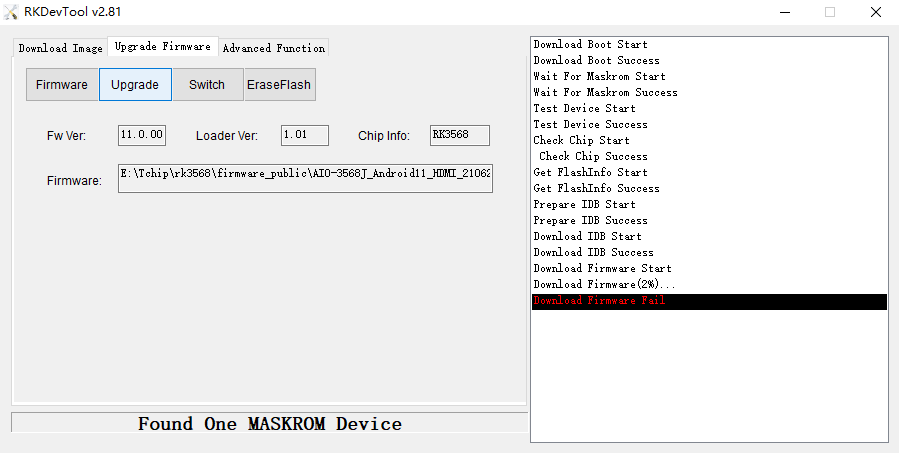
-
如果升级失败,可以尝试使用切换升级存储器里面的方法
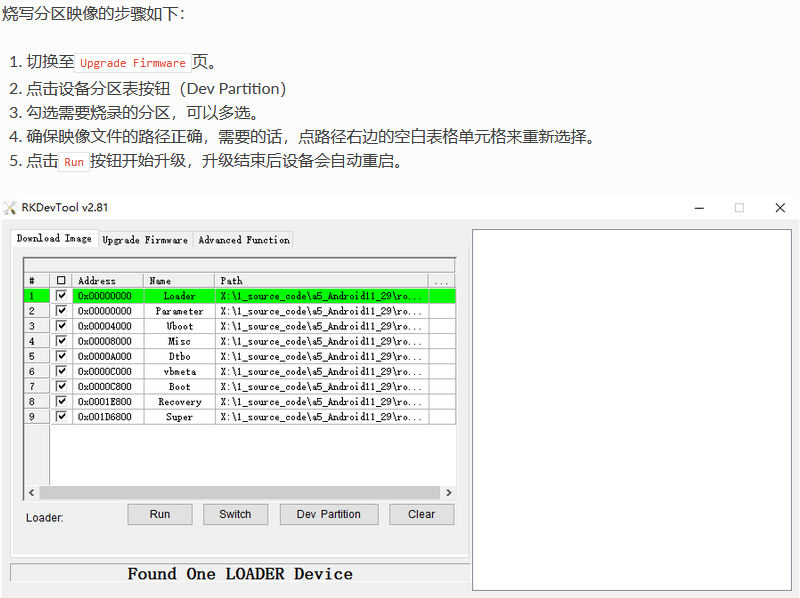
2.6.1.2. 烧写分区映像
2.6.2. Linux操作系统
2.6.2.1. 烧写统一固件 update.img

如果升级失败,可以尝试使用切换升级存储器里面的方法
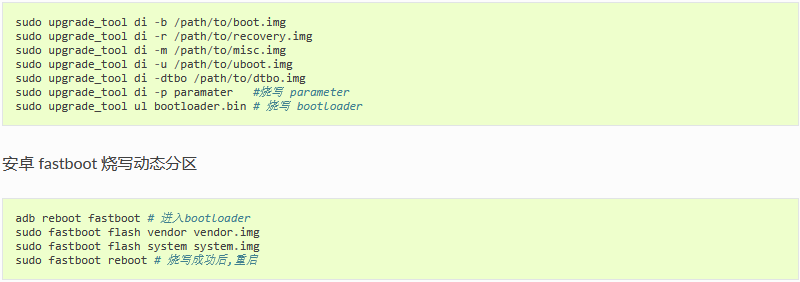
2.6.2.2. 烧写分区镜像
2.7. 常见问题
2.7.1. 1. 如何强行进入 MaskRom 模式
如果板子进入不了 Loader 模式,此时可以尝试强行进入 MaskRom 模式。操作方法见《MaskRom模式》。
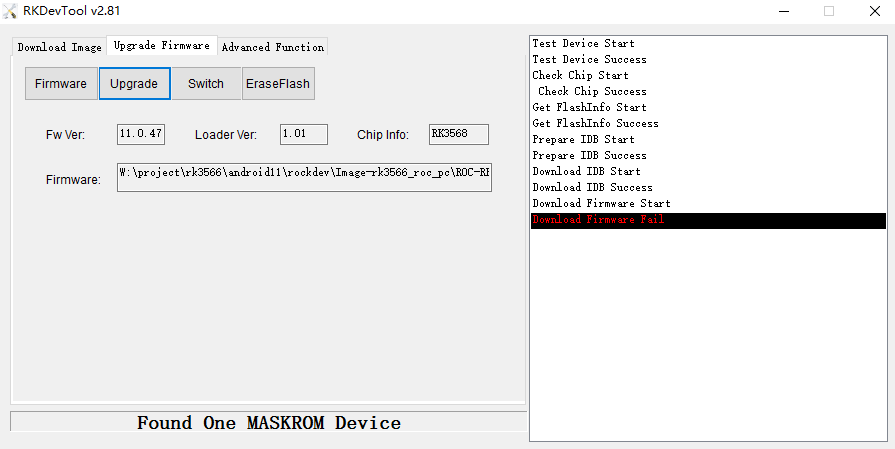
2.7.2. 2. 烧写失败分析
如果烧写过程中出现Download Boot Fail, 或者烧写过程中出错,如下图所示,通常是由于使用的USB线连接不良、劣质线材,或者电脑USB口驱动能力不足导致的,请更换USB线或者电脑USB端口排查。
2.7.3. 3. 贴有Spi Flash(Nor Flash),进入 MaskRom 后,烧录异常
如果板子同时贴有 Spi Flash(Nor Flash) 和 eMMC时,当进入 MaskRom 后,需要切换存储设备,操作方法见《切换升级设备》。
3. MaskRom模式
有关启动模式的介绍,请参阅《升级固件介绍》一章
3.1. 简介
MaskRom 模式是设备变砖的最后一条防线。强行进入 MaskRom 涉及硬件操作,有一定风险,因此仅在设备进入不了 Loader 模式的情况下,方可尝试 MaskRom 模式。进入 MaskRom 的原理是人为的把 EMMC 的数据脚与地线短接,系统会认为 EMMC 数据出错,从而清除 EMMC 数据。
请小心阅读,并谨慎操作!
操作步骤如下:
-
设备断开电源
-
使用双公头USB数据线连接设备和电脑
-
用金属镊子接通iCore-3568JQ上的如下图所示的两个测试点并保持(如下图所示)。
-
设备插入电源
-
稍候片刻,之后松开镊子。
短接EMMC附近的D0和GND 测试点
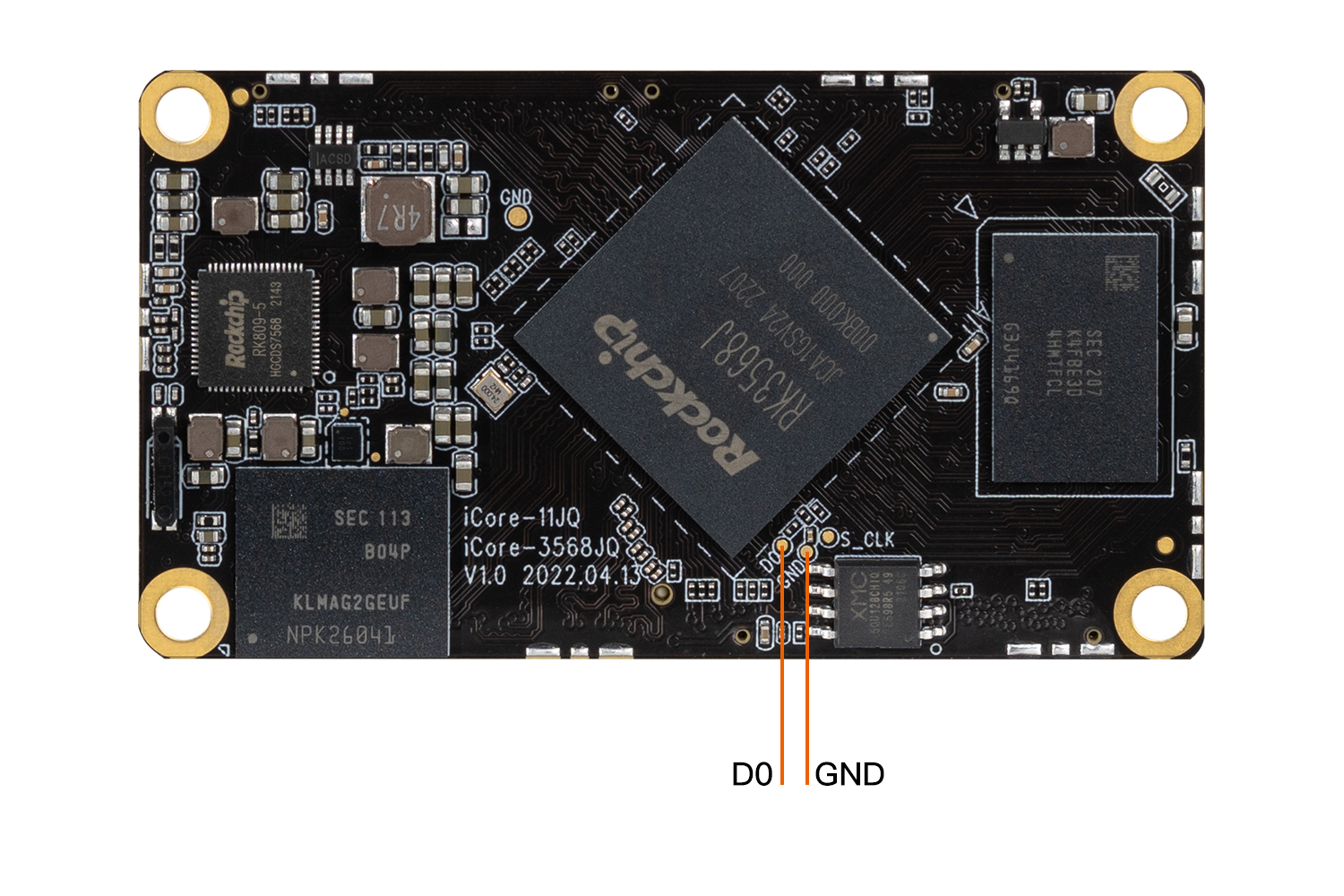
此时设备就会进入 MaskRom 模式。
4. 切换升级存储器
4.1. 前言
本文介绍当主机同时存在 eMMC(默认) 和 NOR Flash 这两种存储器的时候,在烧录固件的时候,需根据以下的启动模式和情况来升级固件。
如下图,则设备有贴 Nor Falsh 存储器。
4.2. Loader 模式
如果是通过 软件执行 reboot loader 或者 通过硬件Recovery 按键进入的Loader 下载模式的话,可不需要看接下来的内容,直接跳到 《使用USB线缆升级固件》 操作。
4.3. Maskrom 模式
如果是通过 《MaskRom模式》 章节进入了Maskrom 模式(或设备异常,经过擦除设备进入Maskrom),而板子同时存在NOR flash和 eMMC 两种存储器,这个时候想要烧录固件,需要区分存储器:
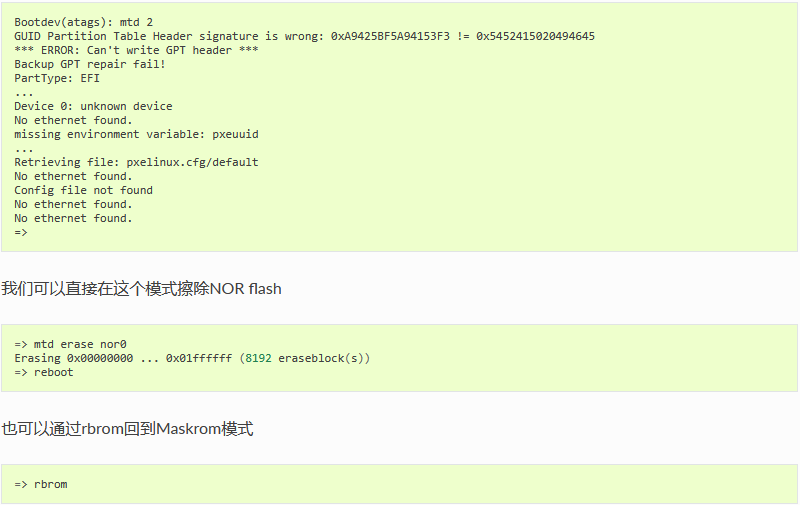
4.3.1. 固件下载到NOR flash
系统在Maskrom模式下默认将固件下载到NOR flash中,不过由于NOR flash 比较小,不足以装载系统镜像,所以一般只会烧写比较小的文件,如MiniLoaderAll.bin。如果不小心将整个固件下载到NOR flash中,会出现下载固件失败的现象, 此时大家可以参考FAQ去处理
4.3.2. 固件下载到eMMC
有两种方法可以将固件烧写进eMMC中,一种是RK原厂提供的烧写方法,需要烧写MiniLoaderAll.bin并切换存储器;另一种是Firefly为了方便大家烧写,提供的一种参考烧写方法,该方法操作上无需要切换存储器,也可以使用Linux端的烧写工具upgrade_tool进行烧写
4.3.2.1. 方法一(Firefly)
此方法仅在官方最新SDK编译或者最新的官方固件中可用。如果在Maskrom模式下不慎将固件下载到NOR flash中,导致重启后无法正常启动, 那么可以进入《MaskRom模式》,烧录最新SDK编译或者官方提供的固件;不管烧录成功还是失败,当机器重启后,假如NOR flash 存在数据则自动擦除,擦除时间大概30~60s,擦除成功后,自动进入Loader模式,之后直接烧录固件即可。
4.3.2.2. 方法二(原厂)
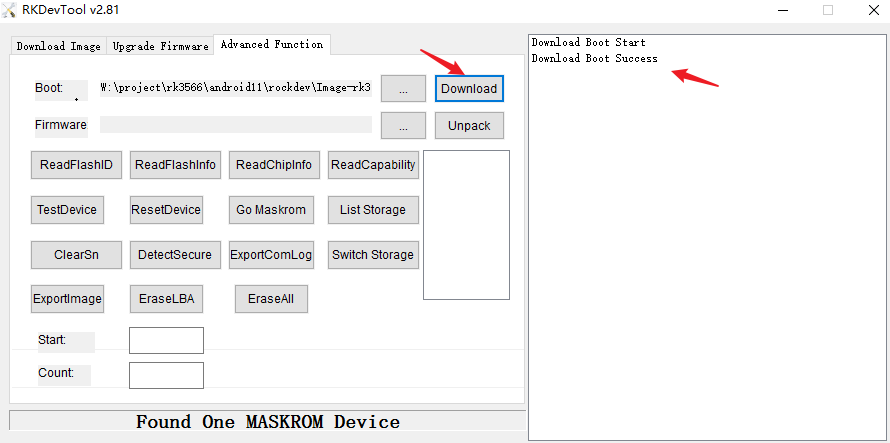
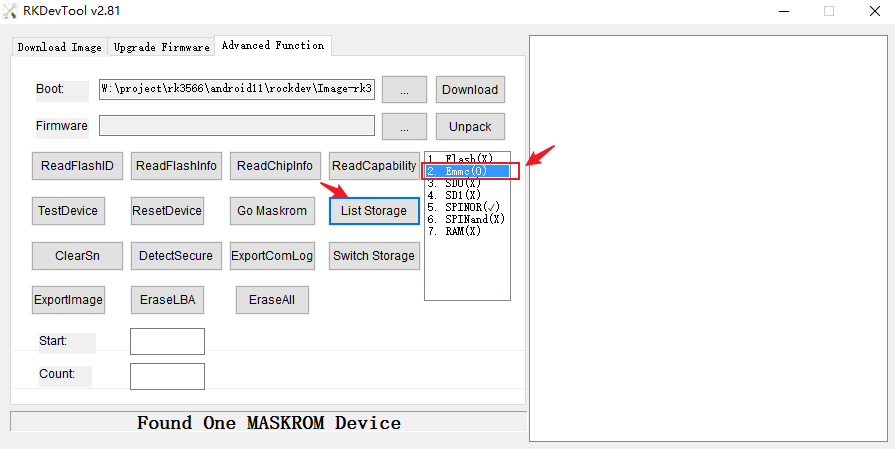
若要将固件下载到eMMC中,需要先下载MiniLoaderAll.bin, 然后选择将存储器切换到eMMC。具体操作步骤如下:

如果还没有编译SDK,可以从以下链接下载 一个对应CPU型号的MiniLoaderAll.bin。
2.点击下载工具的Advanced Function,然后将准备好的MiniLoaderAll.bin下载到存储器中,见下图
3.点击List Storage读取存储器,此时存储列表选中的是SPINOR,为确保Nor flash为空,我们选择EraseAll擦除
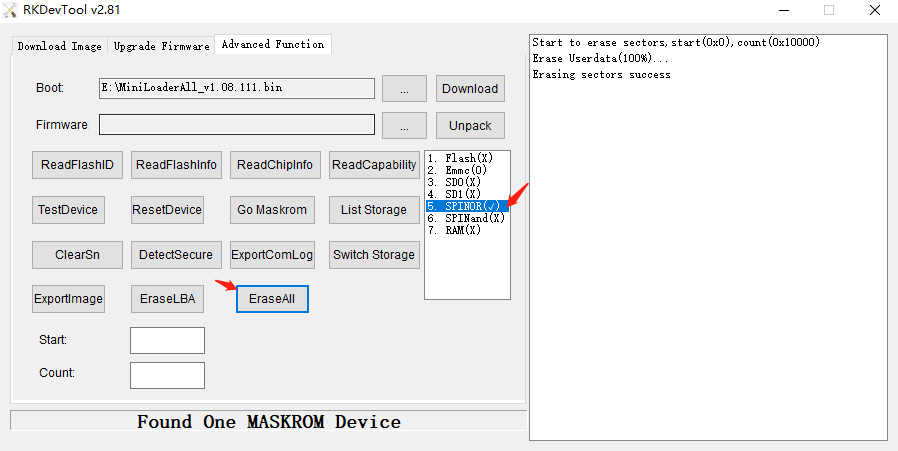
-
X 表示设备不存在该存储器
-
0 表示存在该存储器,但未选中
-
√ 表示存在该存储器并处于被选中状态
4.在存储列表中选中Emmc后点击Switch Storage
可以看到存储列表中的Emmc状态就会从0切到√,表示选择将固件下载到eMMC
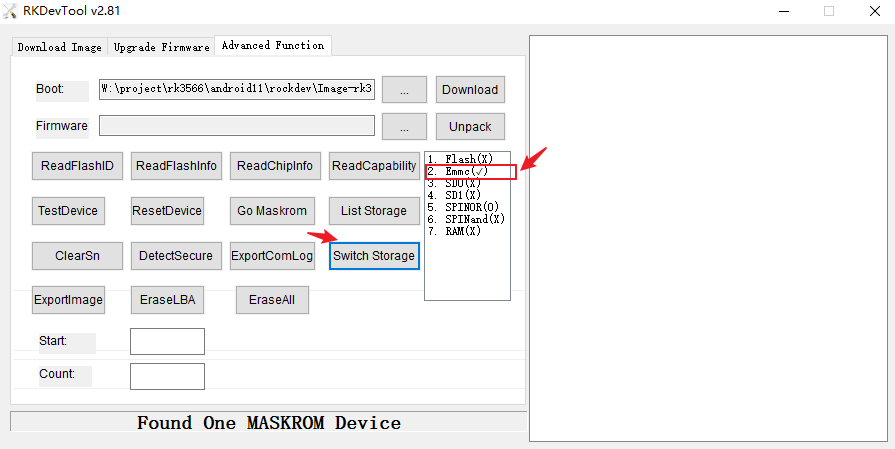
5.点击EraseAll擦除
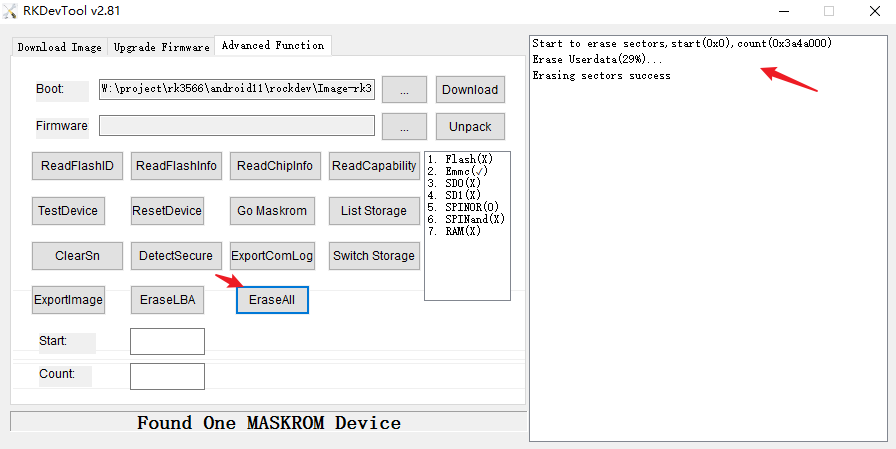
6.点击下载工具的Upgrade Firmware,然后选择我们想要下载进eMMC中的固件进行升级
4.4. FAQ
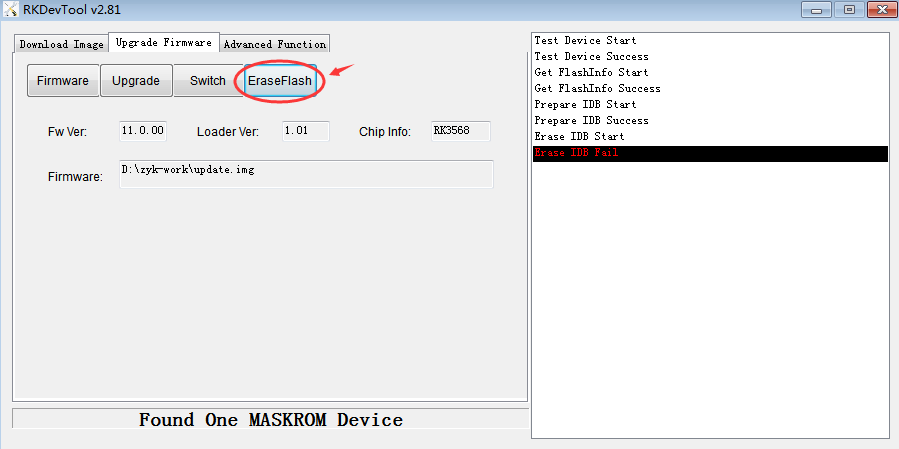
4.4.1. Maskrom模式烧写失败
该现象是因为固件直接烧写进NOR flash中引起的,出现该现象时大家可以根据当前的情况进行处理:
情况一:下载失败时没有断电或重启
可以直接点击EraseFlash擦除NOR flash
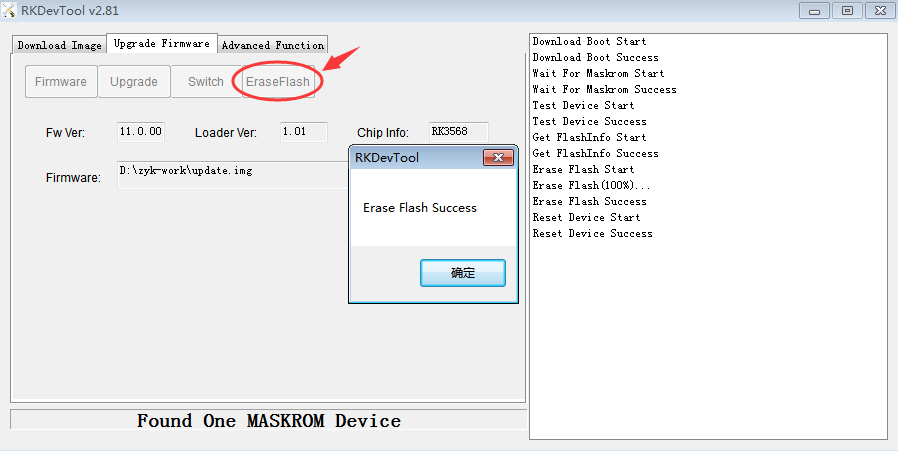
之后按照章节固件下载到eMMC的步骤进行固件升级即可
情况二:有进行过重启或断电的操作
通过Recovery按键进入Loader模式, 然后点击AndroidTool的Go maskrom进入Maskrom模式
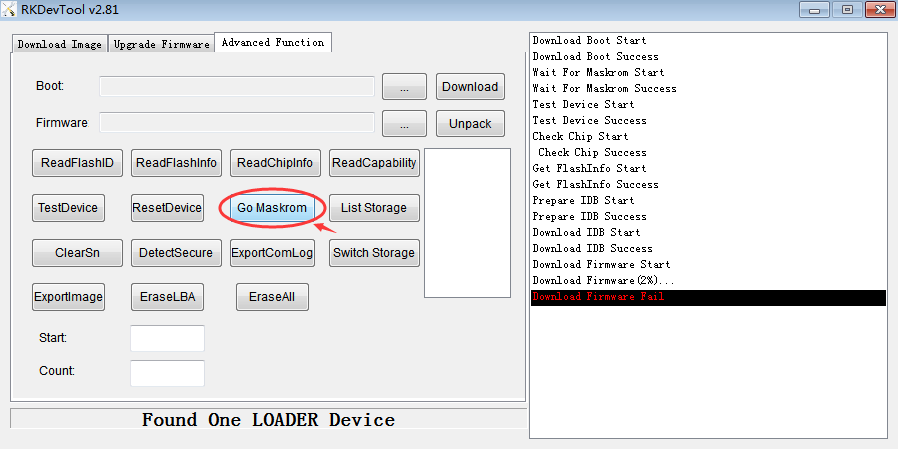
之后按照章节固件下载到eMMC的步骤进行固件升级即可。若不清楚如何通过Recovery按键进入Loader模式请参考使用USB线缆升级固件章节
如果大家有接串口,可以查看一下log信息,其中Bootdev(atags): mtd 2说明系统启动到NOR flash存储器的uboot中
进入到Maskrom模式后,固件升级都需要按照固件下载到eMMC的步骤进行操作
4.4.2. Go Maskrom无效
点击AndroidTool的Go Maskrom无法进入Maskrom模式,rbrom命令同样也不行,原因是部分旧固件不支持从NOR flash的bootloader回到Maskrom模式,此时可通过Recovery按键重新进入Loader模式,点击AndroidTool的EraseFlash进行擦除
无论是否提示擦除IDB失败都重启一下板子,重启后可进入Maskrom模式
4.4.3. 其它
烧写异常问题可参考帖子rk3566/rk3568 烧写异常问题,若遇到其它问题也可以到社区论坛对应的板块发帖
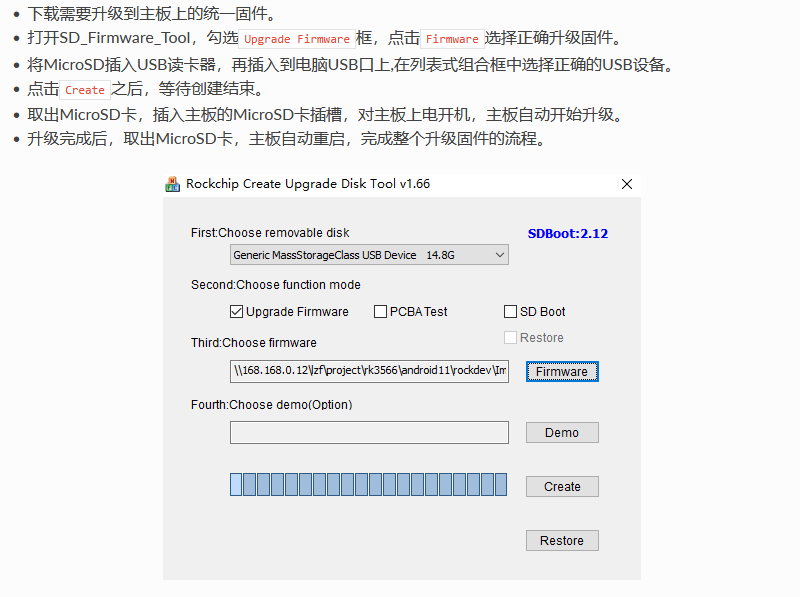
5. 使用SD卡升级固件
本文主要介绍如何通过MicroSD卡,升级主板上的固件。
使用MicroSD升级固件,需要在电脑上,通过做卡工具,将统一固件写入MicroSD卡,目前此操作只支持在Windows操作系统上完成。
5.1. 准备工具
-
主板
-
电脑
-
SD卡
-
USB读卡器
5.2. 操作步骤
Linux开发
1. 编译 Linux4.19 固件
1.1. 编译环境搭建
本章介绍 Linux SDK 的编译环境搭建
注意:
(1)推荐在 X86_64 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
(2)使用普通用户进行编译,不要使用 root 用户权限进行编译。
1.1.1. 获取 SDK
首先准备一个空文件夹用于存放 SDK,建议在 home 目录下,本文以~/proj为例
不要在虚拟机共享文件夹以及非英文目录存放、解压SDK,避免产生不必要的错误
获取 SDK 需要先安装:

-
方法一(推荐)
由于 Firefly_Linux_SDK 源码包比较大,部分用户电脑不支持4G以上文件或单个文件网络传输较慢, 所以我们采用分卷压缩的方法来打包 SDK。用户可以通过如下方式获取 Firefly_Linux_SDK 源码包:Firefly_Linux_SDK源码包
下载完成后先验证一下 MD5 码:
$ md5sum rk356x_linux_release_v1.3.0b_20221213_split_dir/*firefly_split*
409b81a9ed3bb9a7d6af91223836cad5 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file00
75cef82f2bf91052a7d3c6f0b8405a89 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file01
6f20f62e9652f8f999692587a2ac4b79 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file02
113acbbcd18d3abe0552ef296e983a3f rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file03
624c88a4da2eaa4a48f380783b126d00 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file04
1cf861afb0b36c9ebcf26a7d6effb260 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file05
3009e46fc14481e77fe7ec143e217de4 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file06
5e1cc90b99e34f20b75fb506d3e9bcd7 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file07
1a512fa7c9e2fd1a0781f8d40e228402 rk356x_linux_release_v1.3.0b_20221213_split_dir/rk356x_linux_release_v1.3.0b_20221213_firefly_split.file08
确认无误后,就可以解压:

-
方法二
通过 repo 拉取代码,此方法对网络要求较高,有条件可以使用
可选择获取完整 SDK 或者 BSP:
mkdir ~/proj/rk356x_linux_release_v1.3.0b_20221213/
cd ~/proj/rk356x_linux_release_v1.3.0b_20221213/
## 完整 SDK
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rk356x_linux_release.xml
## BSP ( 只包含基础仓库和编译工具 )
## BSP 包括 device/rockchip 、docs 、 kernel 、 u-boot 、 rkbin 、 tools 和交叉编译链
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rk356x_linux_bsp_release.xml
1.1.2. 同步代码
执行如下命令同步代码:

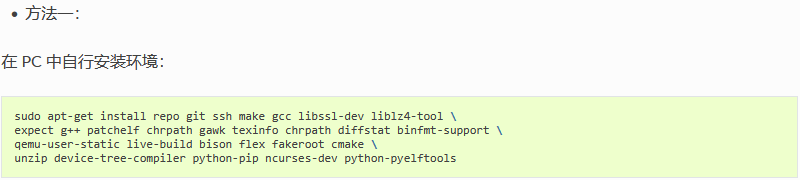
1.1.4. 安装依赖
-
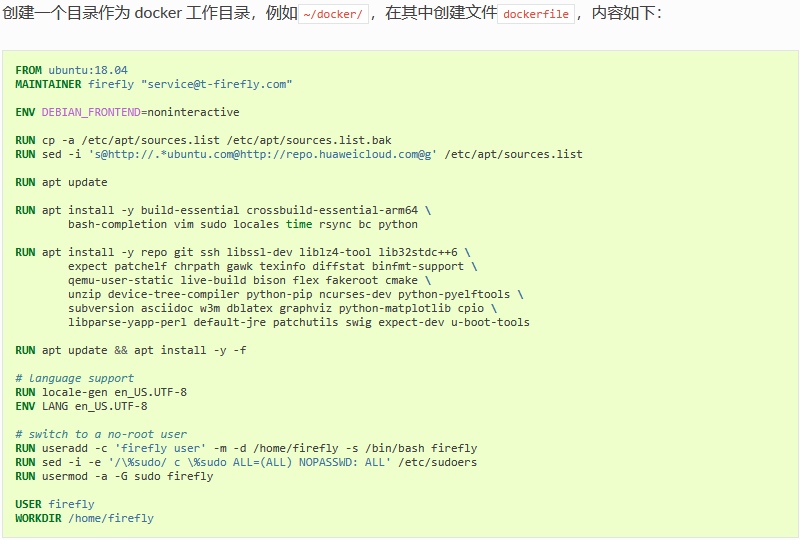
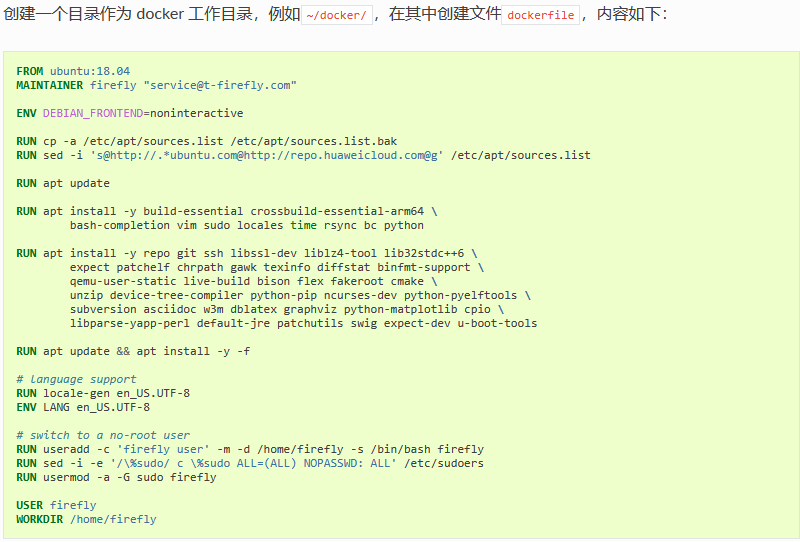
方法二:使用 Docker
使用 dockerfile 创建容器,在容器中进行编译,完美解决编译环境问题,并且与主机环境隔离,互不影响。
首先在主机中安装 docker,请参考:安装教程

镜像创建完毕后,创建容器并启动
# 此处将主机内 SDK 所在文件夹挂载到容器内,这样容器内就能访问主机中的 SDK 了
# source= 填 SDK 所在目录;target= 填容器内的一个目录,必须是空目录
# ubuntu18 是容器名,firefly 是容器 hostname,均可随意更改
# sdkcompiler 是上一步的镜像名
docker run --privileged --mount type=bind,source=/home/fierfly/proj,target=/home/firefly/proj --name="ubuntu18" -h firefly -it sdkcompiler
现在就可以在容器中进行 SDK 的编译了。
退出容器、重启容器的方法:

1.2. 编译 Ubuntu 固件
本章介绍 Ubuntu 固件的编译流程,推荐在 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
1.2.2. 编译 SDK
1.2.2.1. 编译前配置
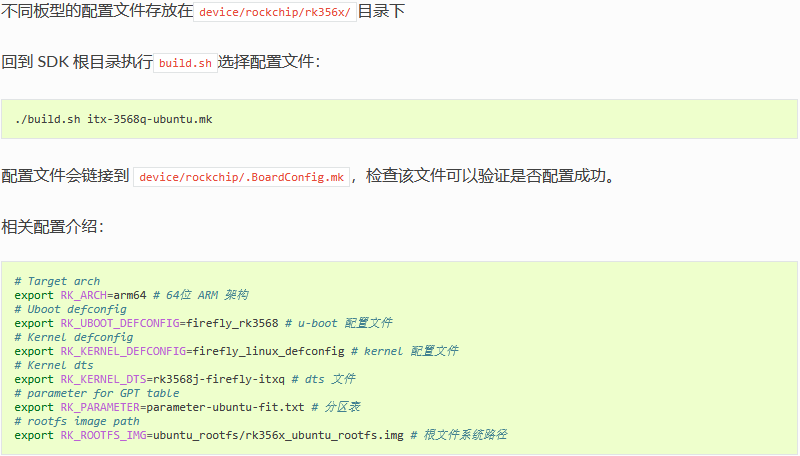
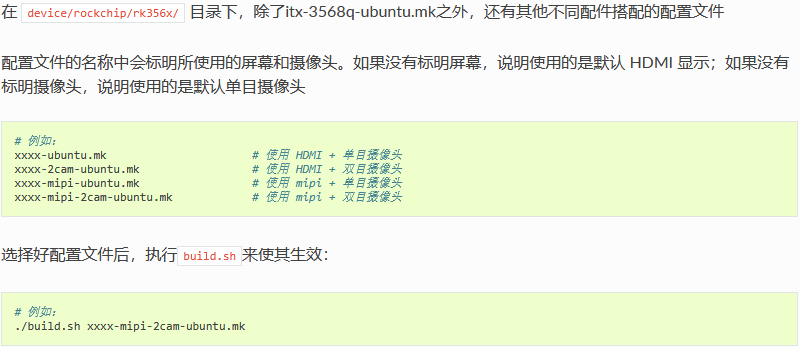
1.2.2.2. 选择编译配件
1.2.2.3. 下载 Ubuntu 根文件系统
-
下载根文件系统:Ubuntu 根文件系统(64位),放到 SDK 路径下
-
解压文件
注意:Firefly kernel 没有开启全部的内核功能,有需求请查看Kernel 使用
不要将 extboot.img 烧录进旧版本固件!
除此之外,extboot ubuntu 还支持以安装包的形式更新内核,详情查看Ubuntu 使用手册

1.2.2.7.2. RAW 固件
RAW 固件,是一种能以逐位复制的方式烧写到存储设备的固件,是存储设备的原始映像。不同于 RK 固件,目前仅支持通过 Etcher 工具烧写至 SD 卡启动。
FIRMWARE_VER: 1.0
MACHINE_MODEL: RK3568
MACHINE_ID: 007
MANUFACTURER: RK3568
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00010000@0x00008000(boot),0x00010000@0x00018000(recovery),0x00010000@0x00028000(backup),0x00c00000@0x00038000(rootfs),-@0x00c38000(userdata:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE 属性是我们关注的地方,以 uboot 为例, 0x00002000@0x00004000(uboot) 中 0x00004000 为uboot 分区的起始位置,0x00002000 为分区的大小,以此类推。
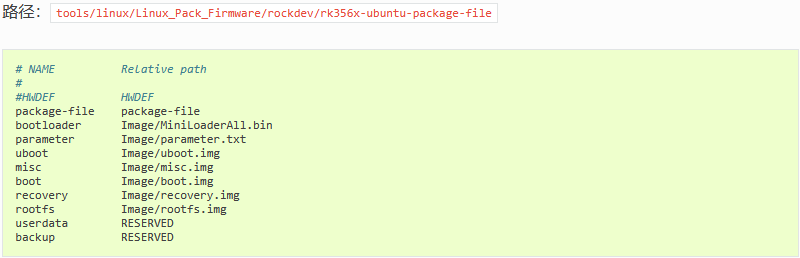
1.2.3.2. package-file
package-file 文件用于打包固件时确定需要的分区镜像和镜像路径,同时它需要与 parameter.txt 文件保持一致。
1.3. 编译 Yocto 固件
1.3.1. 获取SDK
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git -u https://gitlab.com/firefly-linux/manifests.git -b master -m rk356x_yocto_kirkstone_release.xml
.repo/repo/repo sync -c
1.3.2. 编译
1.3.2.1. 选择映像
Yocto 项目提供了一些可用于不 layer 的映像。下表列出目前支持构建的映像和相关配方。
| 映像名字 | 描述 | 提供的layer |
|---|---|---|
| core-image-minimal | A small image that only allows a device to boot | Poky |
| core-image-minimal-xfce | A XFCE minimal demo image | meta-openembedded/meta-xfce |
| core-image-sato | Image with Sato, a mobile environment and visual style for mobile devices. The image supports X11 with a Sato theme, Pimlico applications, and contains terminal, editor, and file manager | Poky |
| core-image-weston | A very basic Wayland image with a terminal | Poky |
| core-image-x11 | A very basic X11 image with a terminal | Poky |
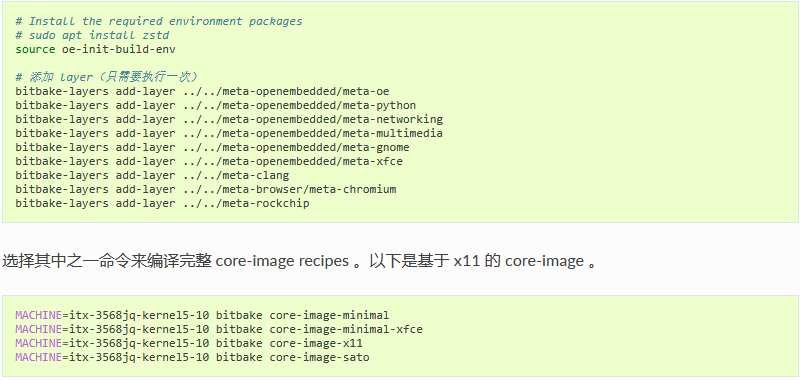
1.3.3. 编译映像文件
使用 bitbake 命令构建的过程需要保证网络连接正常,如果是中国内陆客户需要保证能 ping 通外网
进入目录


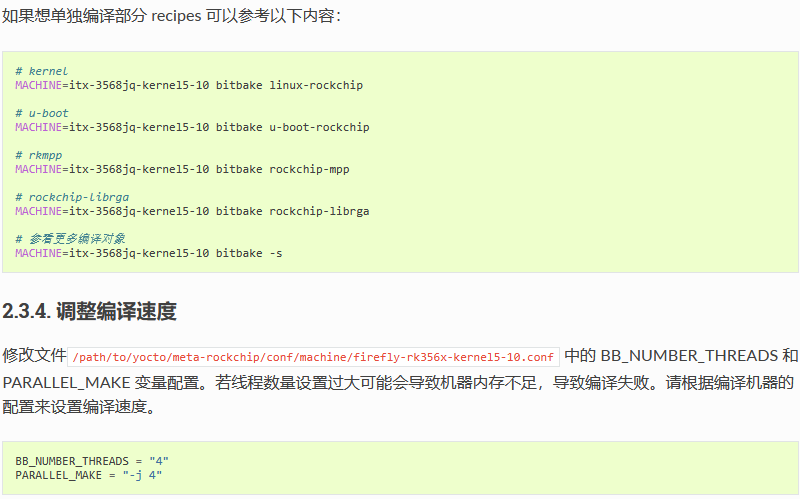
1.3.4. 调整编译速度

-
BB_NUMBER_THREADS: The maximum number of threads BitBake simultaneously executes.
-
BB_NUMBER_PARSE_THREADS: The number of threads BitBake uses during parsing.
-
PARALLEL_MAKE: Extra options passed to the make command during the do_compile task in order to specify parallel compilation on the local build host.
-
PARALLEL_MAKEINST: Extra options passed to the make command during the do_install task in order to specify parallel installation on the local build host.
1.3.5. 更多 bitbake 选项
从根本上说,BitBake 是一个通用任务执行引擎,它允许 shell 和 Python 任务高效并行运行,同时在复杂的任务间依赖约束下工作。 BitBake 的主要用户之一,OpenEmbedded,利用这个核心并使用面向任务的方法构建嵌入式 Linux 软件堆栈。更多详细使用方法请查看《bitbake-user-manual》。

| Bitbake paramater | 描述 |
|---|---|
| -c fetch | 拉取目标所需要的代码 |
| -c clean | 清除目标的输出文件 |
| -c cleanall | 删除目标所有输出文件、共享高速缓存(shared state cache)和源代码 |
| -c compile -f | 使用此选项可在部署映像后强制重新编译,但不建议使用,除非 Yocto Project 不知道目标代码已经发生改变 |
| -c listtasks | 列出目标定义的所有 target |
1.3.6. 分区固件烧写

1.3.8. 相关概述
Yocto Project 是一个专注于嵌入式 Linux® 操作系统开发的开源协作项目,它提供灵活的工具集和开发环境,允许全球的嵌入式设备开发人员通过共享技术,软件堆栈,配置和用于创建这些定制的Linux映像的最佳实践进行协作。有关 Yocto 项目的更多信息,请参阅 Yocto Project 官网:www.yoctoproject.org/。 Yocto Project 官网上有 Yocto Project Reference Manual 和 Yocto Project Overview 等相关文档详细描述了如何构建系统。
1.3.9. Yocto Project Release layer 介绍
| layer | 路径 | 优先级(数字越大优先级越高) | 描述 |
|---|---|---|---|
| meta-oe | meta-openembedded/meta-oe | 6 | contains a large amount of additional recipes |
| meta-python | meta-openembedded/meta-python | 7 | Provide Python recipes |
| meta-qt5 | meta-qt5 | 7 | Provides QT5 recipes |
| meta-clang | meta-clang | 7 | clang compiler |
| meta-rockchip | meta-rockchip | 9 | Rockchip board level support available |
| meta | meta | 5 | Contains the OpenEmbedded-Core metadata |
| meta-poky | meta-poky | 5 | Holds the configuration for the Poky reference distribution |
| meta-yocto-bsp | meta-yocto-bsp | 5 | Configuration for the Yocto Project reference hardware board support package. |
| meta-chromium | meta-chromium | 7 | Provide chromium browser recipe |
1.4. 编译 Buildroot 固件
本章介绍 Buildroot 固件的编译流程,推荐在 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
1.4.1. 编译 SDK
1.4.1.1. 编译前配置

1.4.1.2. 选择编译配件

1.4.1.4. 部分编译

注意:Firefly kernel 没有开启全部的内核功能,有需求请查看Kernel 使用
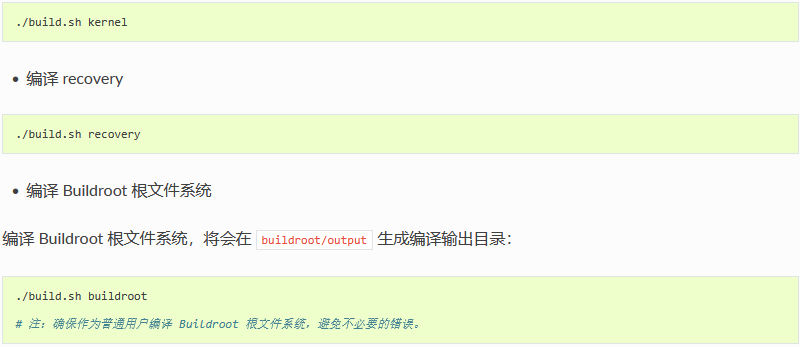
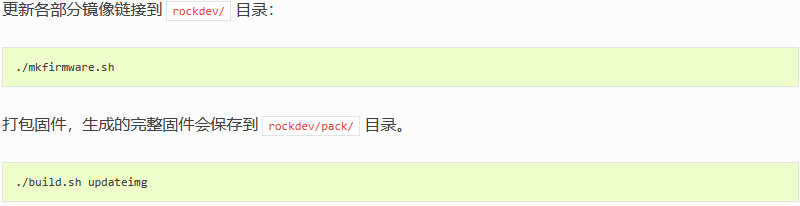
1.4.1.5. 打包固件
1.4.2. 分区说明
1.4.2.1. parameter 分区表
parameter.txt 文件中包含了固件的分区信息,以 parameter-buildroot-fit.txt 为例:
路径:device/rockchip/rk356x/parameter-buildroot-fit.txt
FIRMWARE_VER: 1.0
MACHINE_MODEL: RK3568
MACHINE_ID: 007
MANUFACTURER: RK3568
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00010000@0x00008000(boot),0x00010000@0x00018000(recovery),0x00010000@0x00028000(backup),0x00040000@0x00038000(oem),0x00c00000@0x00078000(rootfs),-@0x00c78000(userdata:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE 属性是我们关注的地方,以 uboot 为例, 0x00002000@0x00004000(uboot) 中 0x00004000 为uboot 分区的起始位置,0x00002000 为分区的大小,以此类推。
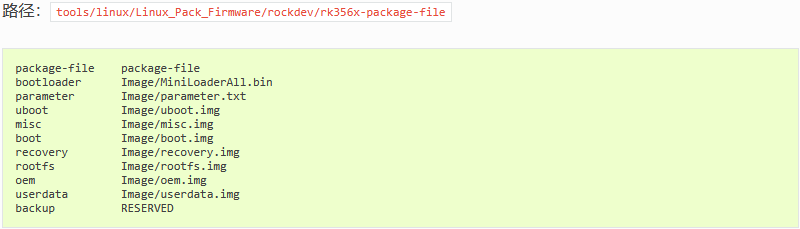
1.4.2.2. package-file
package-file 文件用于打包固件时确定需要的分区镜像和镜像路径,同时它需要与 parameter.txt 文件保持一致。
2. 编译 Linux5.10 固件
2.1. 编译环境搭建
本章介绍 Linux SDK 的编译环境搭建
注意:
(1)推荐在 X86_64 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
(2)使用普通用户进行编译,不要使用 root 用户权限进行编译。
2.1.1. 获取 SDK
首先准备一个空文件夹用于存放 SDK,建议在 home 目录下,本文以~/proj为例
不要在虚拟机共享文件夹以及非英文目录存放、解压SDK,避免产生不必要的错误
获取 SDK 需要先安装:

-
方法一(推荐)
由于 Firefly_Linux_SDK 源码包比较大,部分用户电脑不支持4G以上文件或单个文件网络传输较慢, 所以我们采用分卷压缩的方法来打包 SDK。用户可以通过如下方式获取 Firefly_Linux_SDK 源码包:rk356x_linux5.10_release_20240319_v1.4.0b
下载完成后,提取 SDK:
-
方法二
通过 repo 拉取代码,此方法对网络要求较高,有条件可以使用
可选择获取完整 SDK 或者 BSP:
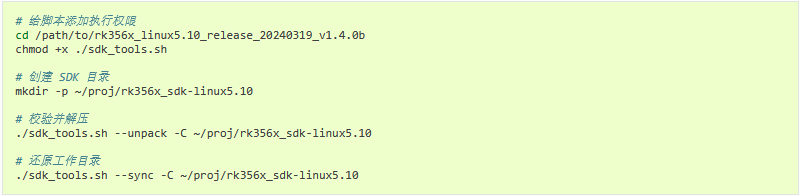
# 创建 SDK 目录
mkdir ~/proj/rk356x_sdk-linux5.10
cd ~/proj/rk356x_sdk-linux5.10
## 完整 SDK
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rk356x_linux5.10_release.xml
## BSP ( 只包含基础仓库和编译工具 )
## BSP 包括 device/rockchip 、docs 、 kernel 、 u-boot 、 rkbin 、 tools 和交叉编译链
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git --no-repo-verify -u https://gitlab.com/firefly-linux/manifests.git -b master -m rk356x_linux5.10_bsp_release.xml
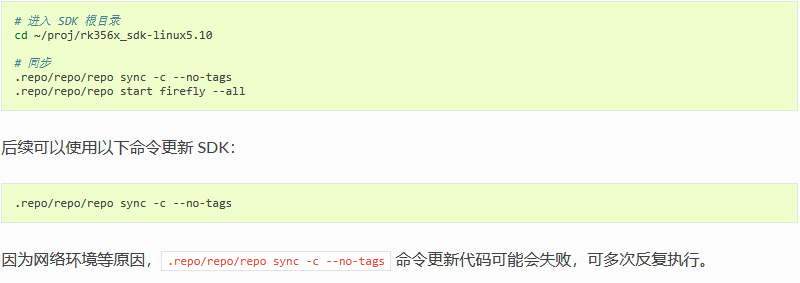
2.1.2. 同步代码
执行如下命令同步代码:
2.1.4. 安装依赖
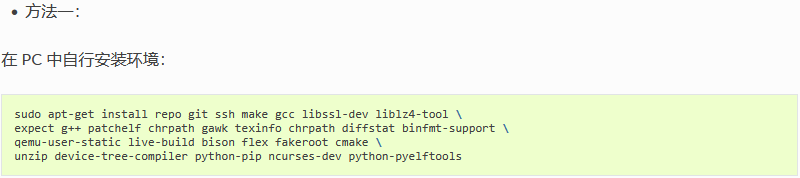
-
方法二:使用 Docker
使用 dockerfile 创建容器,在容器中进行编译,完美解决编译环境问题,并且与主机环境隔离,互不影响。
首先在主机中安装 docker,请参考:安装教程

镜像创建完毕后,创建容器并启动
# 此处将主机内 SDK 所在文件夹挂载到容器内,这样容器内就能访问主机中的 SDK 了
# source= 填 SDK 所在目录;target= 填容器内的一个目录,必须是空目录
# ubuntu18 是容器名,firefly 是容器 hostname,均可随意更改
# sdkcompiler 是上一步的镜像名
docker run --privileged --mount type=bind,source=/home/fierfly/proj,target=/home/firefly/proj --name="ubuntu18" -h firefly -it sdkcompiler
现在就可以在容器中进行 SDK 的编译了。
退出容器、重启容器的方法:

2.2. 编译 Ubuntu 固件
本章介绍 Ubuntu 固件的编译流程,推荐在 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
2.2.2. 编译 SDK
2.2.2.1. 编译前配置

2.2.2.2. 选择编译配件
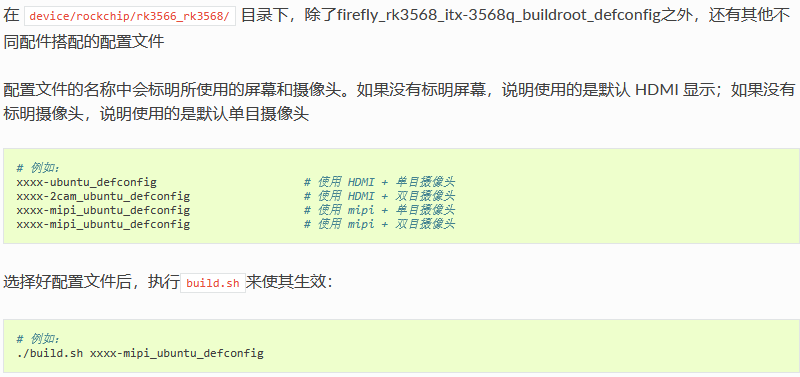
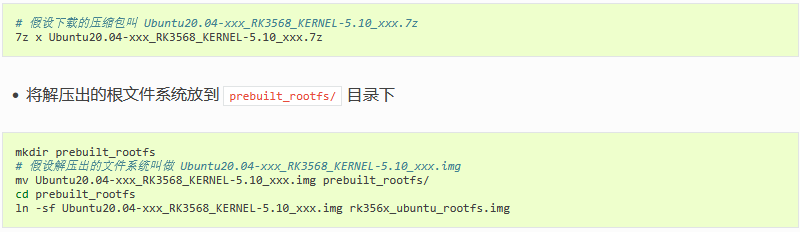
2.2.2.3. 下载 Ubuntu 根文件系统
-
下载根文件系统:Ubuntu 根文件系统(64位),放到 SDK 路径下
-
解压文件
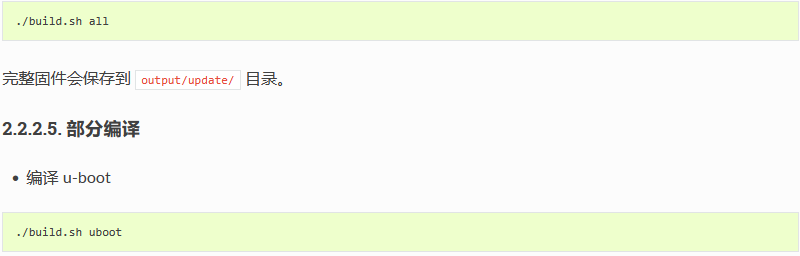
2.2.2.4. 全自动编译
全自动编译会执行所有编译、打包操作,直接生成 RK 固件。
-
编译 kernel
注意:Firefly kernel 没有开启全部的内核功能,有需求请查看Kernel 使用
2.2.3. 分区说明
2.2.3.1. parameter 分区表
parameter.txt 文件中包含了固件的分区信息,以 parameter-ubuntu-fit.txt 为例:
路径:device/rockchip/rk3566_rk3568/parameter-ubuntu-fit.txt
FIRMWARE_VER: 1.0
MACHINE_MODEL: RK3568
MACHINE_ID: 007
MANUFACTURER: RK3568
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
GROW_ALIGN: 0
CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00040000@0x00008000(boot:bootable),0x00020000@0x00048000(recovery),0x00010000@0x00068000(backup),0x00c00000@0x00078000(rootfs),-@0x00c78000(userdata:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE 属性是我们关注的地方,以 uboot 为例, 0x00002000@0x00004000(uboot) 中 0x00004000 为uboot 分区的起始位置,0x00002000 为分区的大小,以此类推。单位是块,每块 512 字节。
2.3. 编译 Yocto 固件
2.3.1. 获取SDK
repo init --no-clone-bundle --repo-url https://gitlab.com/firefly-linux/git-repo.git -u https://gitlab.com/firefly-linux/manifests.git -b master -m rk356x_yocto_kirkstone_release.xml
.repo/repo/repo sync -c
2.3.2. 编译
2.3.2.1. 选择映像
Yocto 项目提供了一些可用于不 layer 的映像。下表列出目前支持构建的映像和相关配方。
| 映像名字 | 描述 | 提供的layer |
|---|---|---|
| core-image-minimal | A small image that only allows a device to boot | Poky |
| core-image-minimal-xfce | A XFCE minimal demo image | meta-openembedded/meta-xfce |
| core-image-sato | Image with Sato, a mobile environment and visual style for mobile devices. The image supports X11 with a Sato theme, Pimlico applications, and contains terminal, editor, and file manager | Poky |
| core-image-weston | A very basic Wayland image with a terminal | Poky |
| core-image-x11 | A very basic X11 image with a terminal | Poky |
2.3.3. 编译映像文件
使用 bitbake 命令构建的过程需要保证网络连接正常,如果是中国内陆客户需要保证能 ping 通外网
进入目录

-
BB_NUMBER_THREADS: The maximum number of threads BitBake simultaneously executes.
-
BB_NUMBER_PARSE_THREADS: The number of threads BitBake uses during parsing.
-
PARALLEL_MAKE: Extra options passed to the make command during the do_compile task in order to specify parallel compilation on the local build host.
-
PARALLEL_MAKEINST: Extra options passed to the make command during the do_install task in order to specify parallel installation on the local build host.
2.3.5. 更多 bitbake 选项
从根本上说,BitBake 是一个通用任务执行引擎,它允许 shell 和 Python 任务高效并行运行,同时在复杂的任务间依赖约束下工作。 BitBake 的主要用户之一,OpenEmbedded,利用这个核心并使用面向任务的方法构建嵌入式 Linux 软件堆栈。更多详细使用方法请查看《bitbake-user-manual》。

| Bitbake paramater | 描述 |
|---|---|
| -c fetch | 拉取目标所需要的代码 |
| -c clean | 清除目标的输出文件 |
| -c cleanall | 删除目标所有输出文件、共享高速缓存(shared state cache)和源代码 |
| -c compile -f | 使用此选项可在部署映像后强制重新编译,但不建议使用,除非 Yocto Project 不知道目标代码已经发生改变 |
| -c listtasks | 列出目标定义的所有 target |
2.3.6. 分区固件烧写

2.3.8. 相关概述
Yocto Project 是一个专注于嵌入式 Linux® 操作系统开发的开源协作项目,它提供灵活的工具集和开发环境,允许全球的嵌入式设备开发人员通过共享技术,软件堆栈,配置和用于创建这些定制的Linux映像的最佳实践进行协作。有关 Yocto 项目的更多信息,请参阅 Yocto Project 官网:www.yoctoproject.org/。 Yocto Project 官网上有 Yocto Project Reference Manual 和 Yocto Project Overview 等相关文档详细描述了如何构建系统。
2.3.9. Yocto Project Release layer 介绍
| layer | 路径 | 优先级(数字越大优先级越高) | 描述 |
|---|---|---|---|
| meta-oe | meta-openembedded/meta-oe | 6 | contains a large amount of additional recipes |
| meta-python | meta-openembedded/meta-python | 7 | Provide Python recipes |
| meta-qt5 | meta-qt5 | 7 | Provides QT5 recipes |
| meta-clang | meta-clang | 7 | clang compiler |
| meta-rockchip | meta-rockchip | 9 | Rockchip board level support available |
| meta | meta | 5 | Contains the OpenEmbedded-Core metadata |
| meta-poky | meta-poky | 5 | Holds the configuration for the Poky reference distribution |
| meta-yocto-bsp | meta-yocto-bsp | 5 | Configuration for the Yocto Project reference hardware board support package. |
| meta-chromium | meta-chromium | 7 | Provide chromium browser recipe |
2.4. 编译 Buildroot 固件
本章介绍 Buildroot 固件的编译流程,推荐在 Ubuntu 18.04 系统环境下进行开发,若使用其它系统版本,可能需要对编译环境做相应调整。
2.4.1. 编译 SDK
2.4.1.1. 编译前配置

2.4.1.2. 选择编译配件

2.4.1.4. 部分编译

编译目录在 buildroot/output/ 下
2.4.1.5. 打包固件
FIRMWARE_VER: 1.0
MACHINE_MODEL: RK3568
MACHINE_ID: 007
MANUFACTURER: RK3568
MAGIC: 0x5041524B
ATAG: 0x00200800
MACHINE: 0xffffffff
CHECK_MASK: 0x80
PWR_HLD: 0,0,A,0,1
TYPE: GPT
GROW_ALIGN: 0
CMDLINE: mtdparts=:0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00040000@0x00008000(boot:bootable),0x00020000@0x00048000(recovery),0x00010000@0x00068000(backup),0x00040000@0x00078000(oem),0x00c00000@0x000b8000(rootfs),-@0x00cb8000(userdata:grow)
uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE 属性是我们关注的地方,以 uboot 为例, 0x00002000@0x00004000(uboot) 中 0x00004000 为uboot 分区的起始位置,0x00002000 为分区的大小,以此类推。单位是块,每块 512 字节。
Firefly Linux 开发指南
4. 技术案例
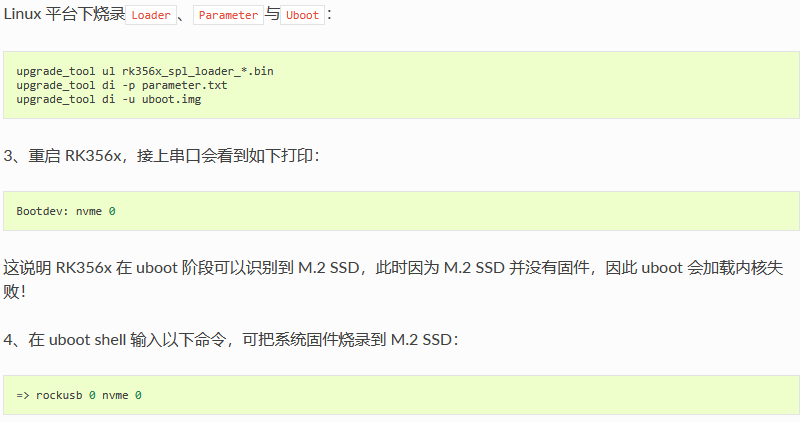
4.1. SSD 启动
本章节介绍如何把固件烧录到 SSD,并从 SSD 启动系统。
准备工作:
-
RK356x 平台
-
良好的 M.2 SSD 或者 SATA SSD
-
良好的 Type-C 数据线
-
更新到最新的 Linux SDK,进入 u-boot 目录,确保有以下提交:
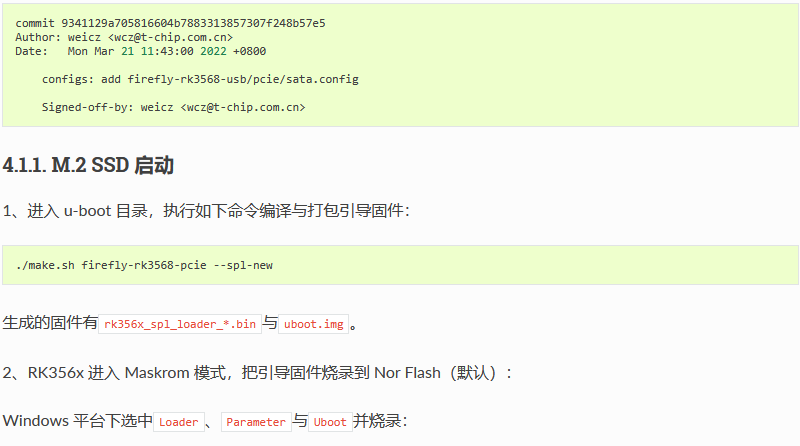

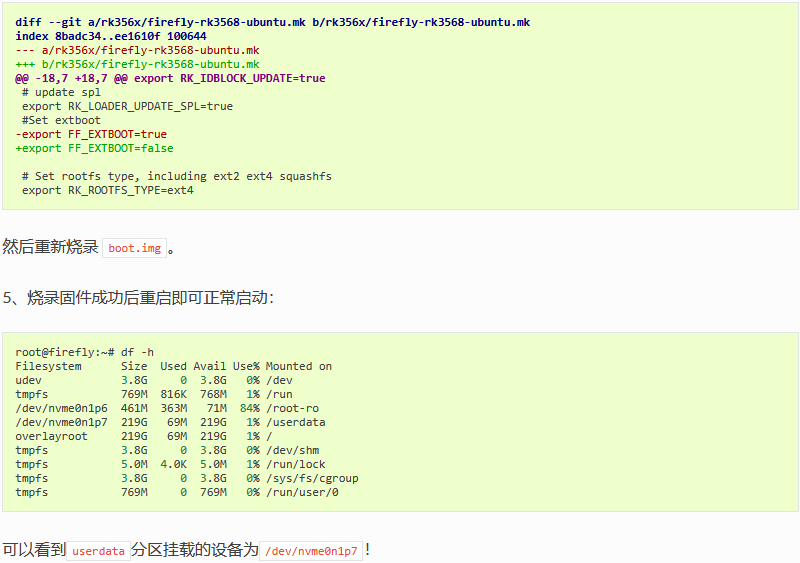
注意的是如果设备使用了 extboot,则需要进行取消,目前 M.2 SSD 在 extboot 下兼容性较差。
取消 extboot:
4.1.2. SATA SSD 启动
SATA SSD 启动的操作步骤与 M.2 SSD 启动类似,不同点如下:

Android开发
1. ADB 使用
1.1. 前言
ADB,全称 Android Debug Bridge,是 Android 的命令行调试工具,可以完成多种功能,如跟踪系统日志,上传下载文件,安装应用等。
1.2. 准备连接
使用 adb时,你需要:
-
ITX-3568Q用双公头USB数据线连接设备和主机;
-
基于你的主机系统安装 adb 驱动和命令。(后面会介绍到)
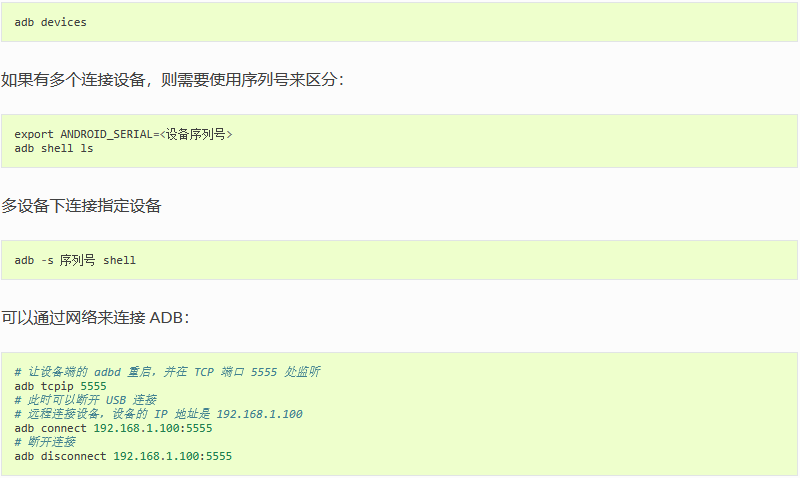
1.3. 网络 ADB

1.4. Windows下的 ADB 安装
首先参照安装 RK USB 驱动一节安装好驱动。
然后下载 adb.zip,解压到 C:adb 以方便调用。
打开命令行窗口,输入:

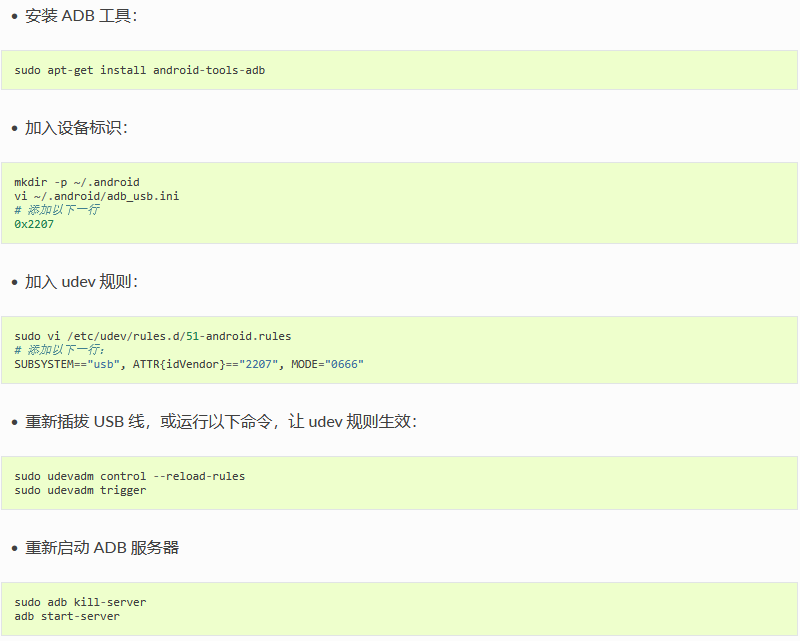
1.5. Ubuntu 下的 ADB 安装
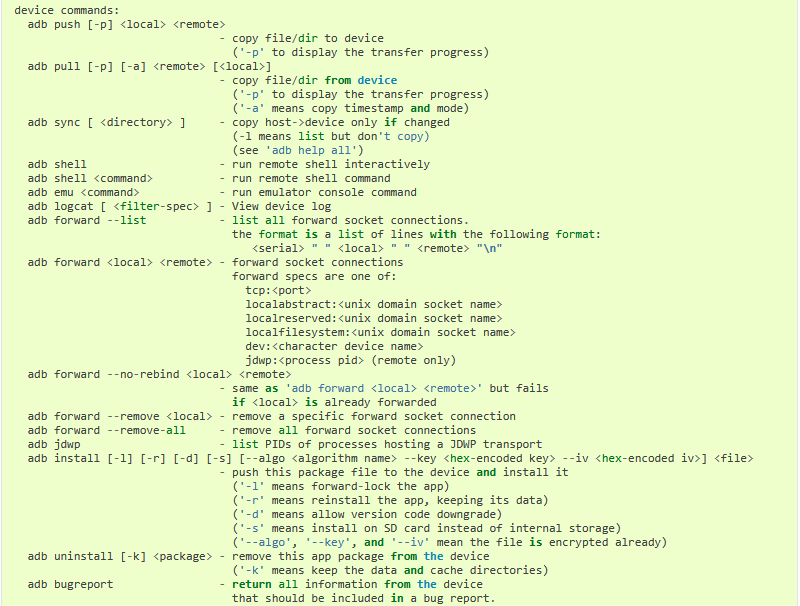
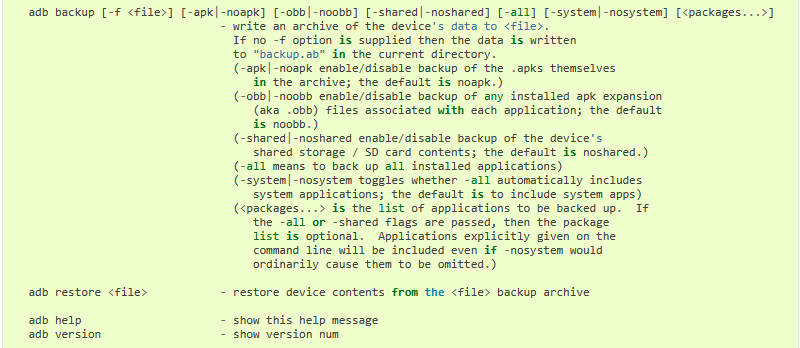
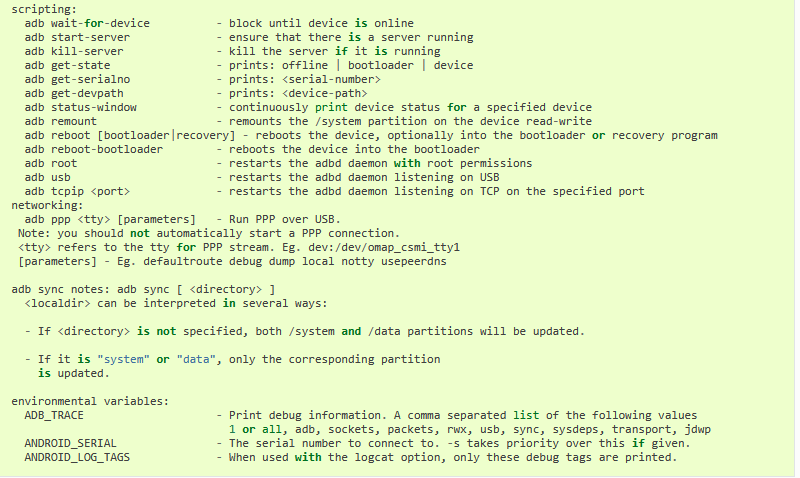
1.6. 常用 ADB 命令
1.6.1. 连接管理
列出所有连接设备及其序列号:
1.7. 调试
1.7.1. 获取系统日志 adb logcat

1.7.3. root 权限
如果 TARGET_BUILD_VARIANT 使用的是 userdebug 模式,要获得 root 权限,需要先运行:

1.8. 应用管理
1.8.1. 安装应用 adb install

1.8.2. 卸载应用 adb uninstall
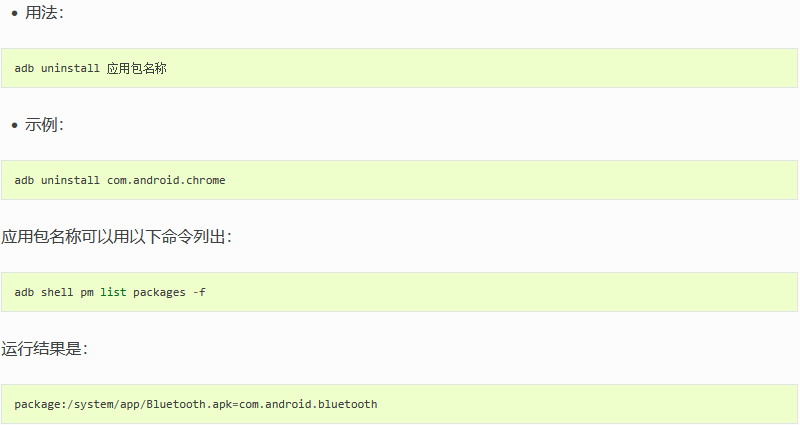
前面是 apk 文件,后面则是对应的包名称。
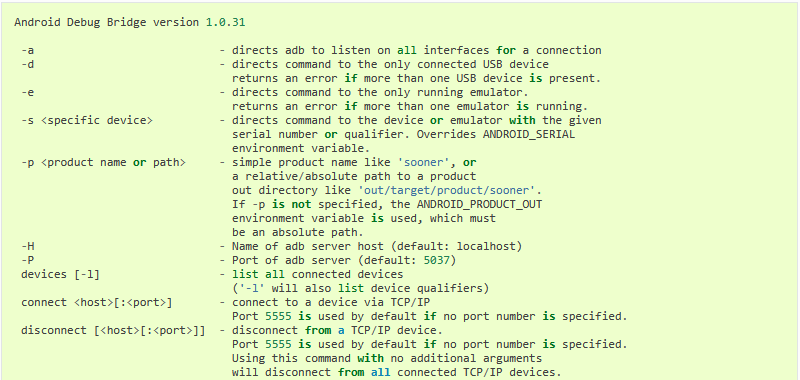
1.8.3. 命令行帮助信息 adb help
2. 编译环境搭建
2.1. 准备工作
编译 Android 对机器的配置要求较高:
-
64 位 CPU
-
16GB 物理内存 交换内存
-
250GB 空闲的磁盘空间
建议使用 Ubuntu 18.04 操作系统
-
Ubuntu 14.04 软件包安装参考:
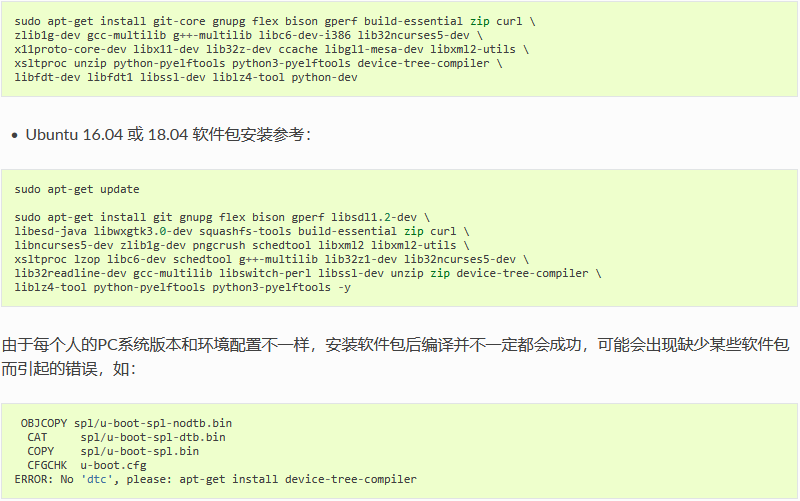
此时视报错信息去安装缺少的软件包即可
3. 编译 Android11.0 固件
运行 Android11.0,iCore-3568JQ需要满足如下条件:
-
DDR至少需要 2GB
-
eMMC至少需要 16GB
3.1. Android SDK
SDK 源码与 bundle 压缩包均存放在云盘中。
3.1.1. 第一步,下载 SDK
-
由于 SDK 较大,可以去下载页面选择云盘下载 Firefly-RK356X_Android11.0_git
-
下载完成后,在解压前先校验下 MD5 码:
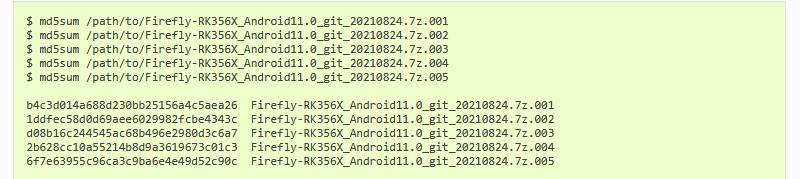

3.1.2. 第二步,更新 SDK
下载 SDK 后,从 gitlab 处更新代码的方法:
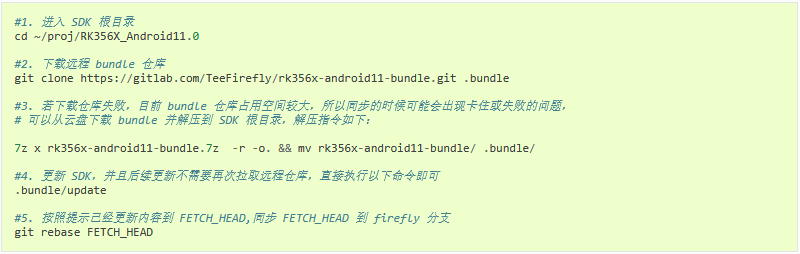
随着 SDK 的更新,bundle 也会随之越来越大,可以去下载页面选择云盘下载 bundle。
3.2. iCore-3568JQ 产品编译方法
注意:若是第一次编译该Android Product,请使用公版编译命令进行一次完整编译
3.2.1. 公版编译
3.2.1.1. HDMI

3.2.4. 双目摄像头 CAM-2MS2MF 编译
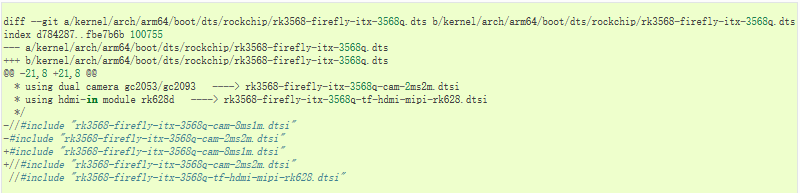
3.2.4.1. HDMI CAM-2MS2MF
-
修改 dts
diff --git a/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts b/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts index d784287..fbe7b6b 100755 --- a/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts b/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts @@ -21,8 21,8 @@ * using dual camera gc2053/gc2093 ----> rk3568-firefly-itx-3568q-cam-2ms2m.dtsi * using hdmi-in module rk628d ----> rk3568-firefly-itx-3568q-tf-hdmi-mipi-rk628.dtsi */ -#include "rk3568-firefly-itx-3568q-cam-8ms1m.dtsi" -//#include "rk3568-firefly-itx-3568q-cam-2ms2m.dtsi" //#include "rk3568-firefly-itx-3568q-cam-8ms1m.dtsi" #include "rk3568-firefly-itx-3568q-cam-2ms2m.dtsi" //#include "rk3568-firefly-itx-3568q-tf-hdmi-mipi-rk628.dtsi"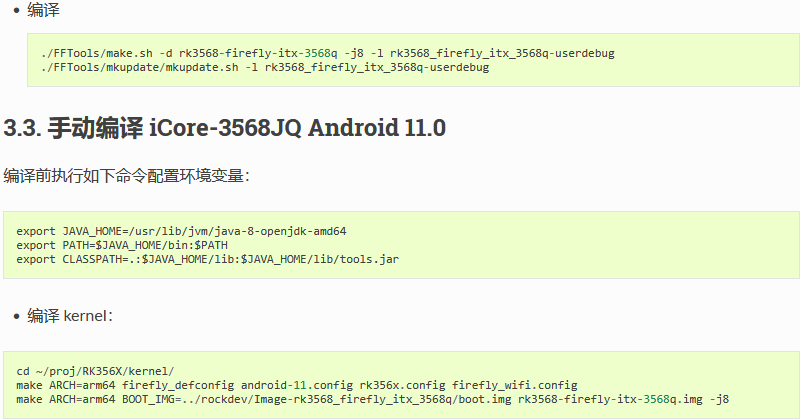
注意:进行内核debug的时候,单编译生成boot.img如果出现运行错误,可参考FAQs

打包完成后将在rockdev/Image-XXX/ 目录下生成统一固件: product名XXX_XXX_日期XXX.img
在 Windows 下打包统一固件 update.img 也很简单,将编译生成的文件拷贝到 AndroidTool 的 rockdevImage 目录中,然后运行 rockdev 目录下的 mkupdate.bat 批处理文件即可创建 update.img 并存放到 rockdevImage 目录里。
-
Firefly Android 开发指南
FireflyApi2 使用手册
驱动开发
1. ADC 使用
1.1. 简介
ITX-3568Q 开发板上的 AD 接口有两种,分别为:温度传感器 (Temperature Sensor)、逐次逼近ADC (Successive Approximation Register)。其中:
-
TS-ADC(Temperature Sensor):支持两通道,时钟频率必须低于800KHZ
-
SAR-ADC(Successive Approximation Register):支持六通道单端10位的SAR-ADC,时钟频率必须小于13MHZ。
内核采用工业 I/O 子系统来控制 ADC,该子系统主要为 AD 转换或者 DA 转换的传感器设计。 下面以 SAR-ADC 为例子,介绍 ADC 的基本配置方法。
1.2. DTS配置
1.2.1. 配置DTS节点

这里申请的是 SARADC 通道2
1.2.2. 在驱动文件中匹配 DTS 节点

1.3. 驱动说明
1.3.1. 获取 AD 通道

注意:
-
Vref 为标准电压
-
n 为 AD 转换的位数
-
Vresult 为用户所需要的采集电压
-
raw 为 AD 采集的原始数据
例如,标准电压为 1.8V,AD 采集位数为 10 位,AD 采集到的原始数据为 568,则:

1.5. 调试方法
1.5.1. Demo 程序使用

1.6. FAQs
1.6.1. 为何按上面的步骤申请 SARADC,会出现申请报错的情况?
驱动需要获取ADC通道来使用时,需要对驱动的加载时间进行控制,必须要在saradc初始化之后。saradc是使用module_platform_driver()进行平台设备驱动注册,最终调用的是module_init()。所以用户的驱动加载函数只需使用比module_init()优先级低的,例如:late_initcall(),就能保证驱动的加载的时间比saradc初始化时间晚,可避免出错。
2. Camera 使用
2.1. MIPI CSI用法
RK3566/RK3568平台仅有一个标准物理mipi csi2 dphy,可以工作在两个模式: full mode 和split mode, 拆分为csi2_dphy0/csi2_dphy1/csi2_dphy2三个逻辑dphy(参见rk3568.dtsi)
2.1.1. Full Mode
-
仅使用csi2_dphy0,csi2_dphy0与csi2_dphy1/csi2_dphy2互斥,不可同时使用;
-
data lane最大4 lanes;
-
最大速率2.5Gbps/lane;
2.1.2. Split Mode
-
仅使用csi2_dphy1和csi2_dphy2, 与csi2_dphy0互斥,不可同时使用;
-
csi2_dphy1和csi2_dphy2可同时使用;
-
csi2_dphy1和csi2_dphy2各自的data lane最大是2 lanes;
-
csi2_dphy1对应物理dphy的lane0/lane1;
-
csi2_dphy2对应物理dphy的lane2/lane3;
-
最大速率2.5Gbps/lane
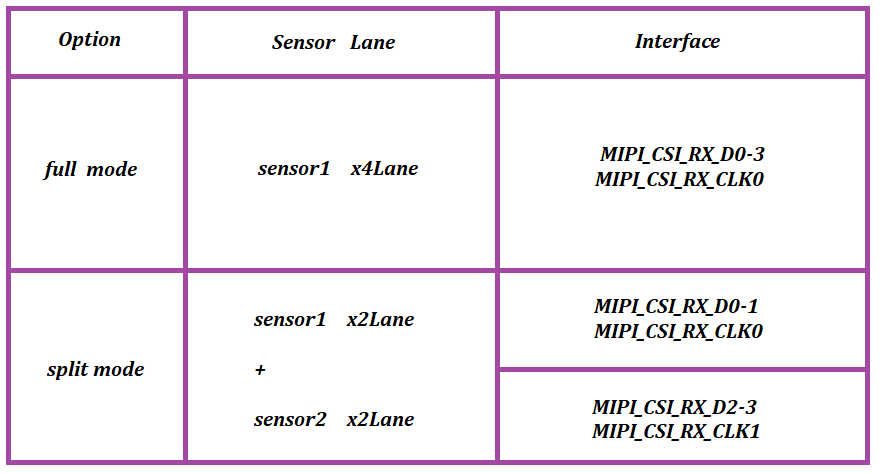
简单点来讲,如果用单目摄像头我们可以配置full mode,若使用双目摄像头我们可以配置split mode
2.2. Full Mode配置
链接关系: sensor->csi2_dphy0->isp
2.2.1. Full Mode设备树配置要点
2.2.2. 配置sensor端
我们需要根据板子原理图的MIPI CSI接口找到sensor是挂在哪个I2C总线上,然后在对应的I2C节点配置camera节点,正确配置camera模组的I2C设备地址、引脚等属性。如下iCore-3568JQ的xc7160配置:
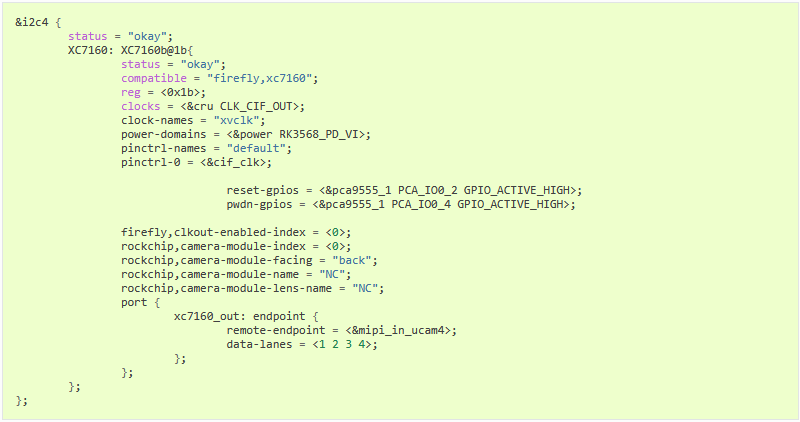
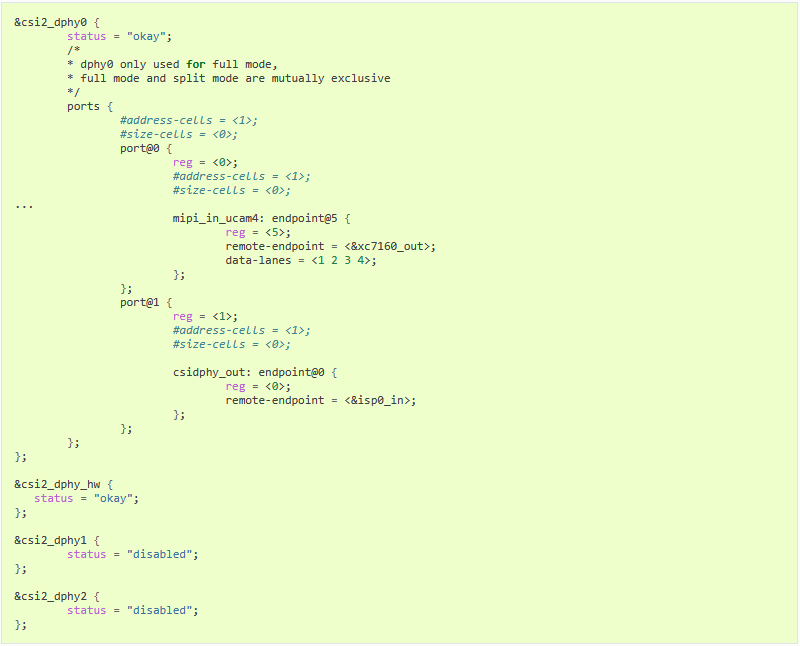
2.2.3. csi2_dphy0相关配置
csi2_dphy0与csi2_dphy1/csi2_dphy2互斥,不可同时使用。另外需要使能csi2_dphy_hw节点
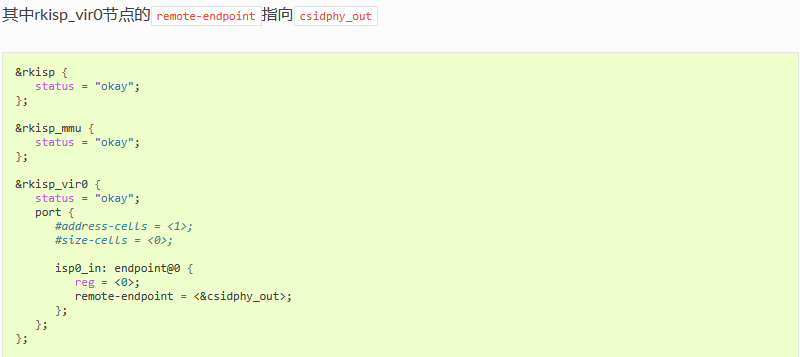
2.2.4. isp相关配置
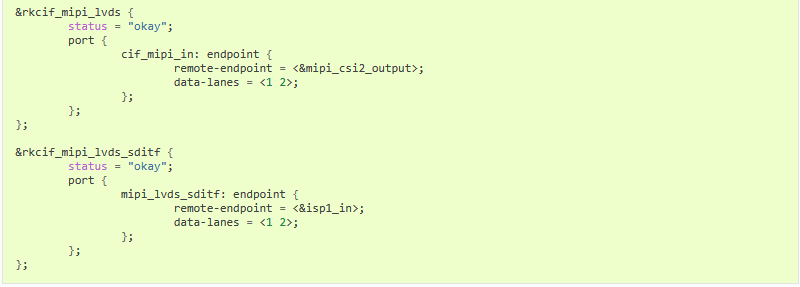
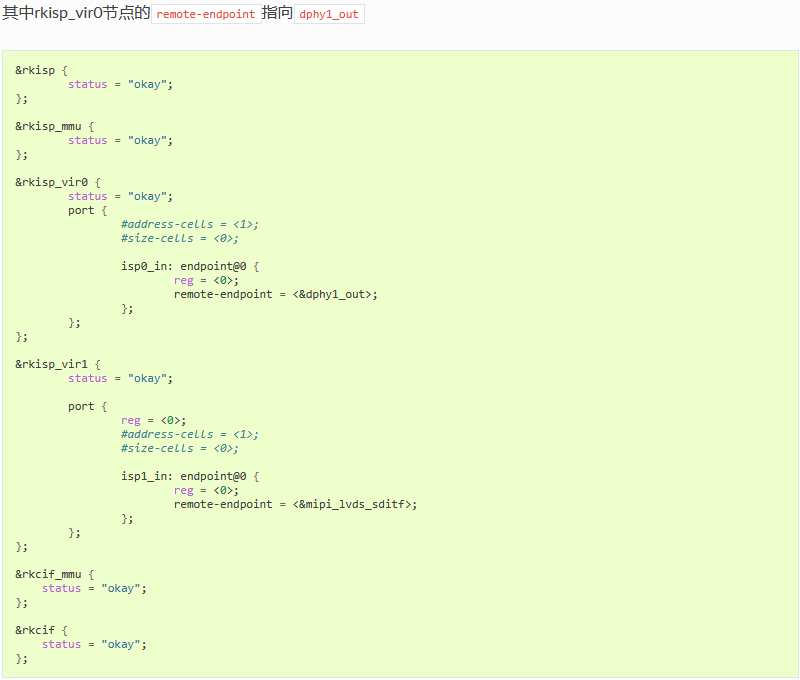
2.3. Split Mode配置
链接关系:
sensor1->csi_dphy1->isp_vir0
sensor2->csi_dphy2->mipi_csi2->vicap->isp_vir1
2.3.1. Split Mode设备树配置要点
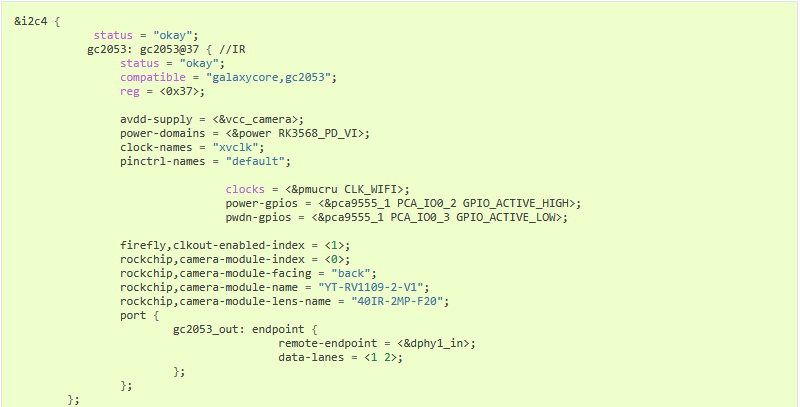
2.3.2. 配置sensor端
我们需要根据板子原理图的MIPI CSI接口找到两个sensor是挂在哪个I2C总线上,然后在对应的I2C节点配置两个camera节点,正确配置camera模组的I2C设备地址、引脚等属性。如下iCore-3568JQ的gc2053/gc2093配置:
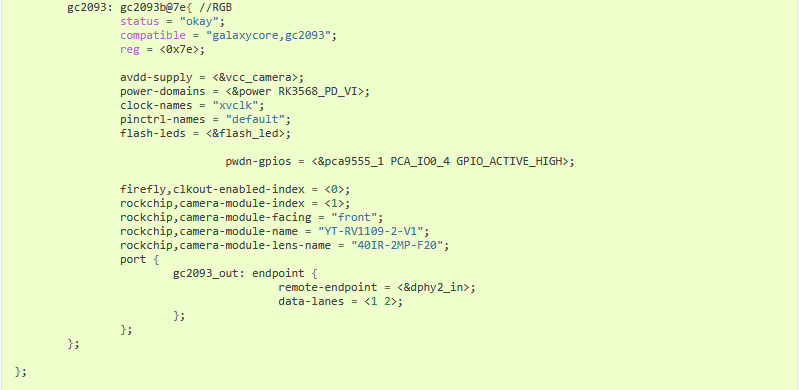
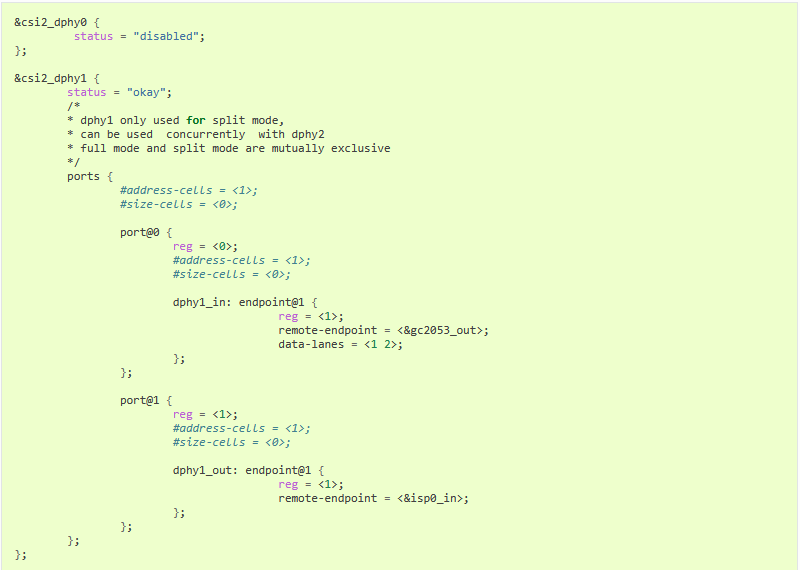
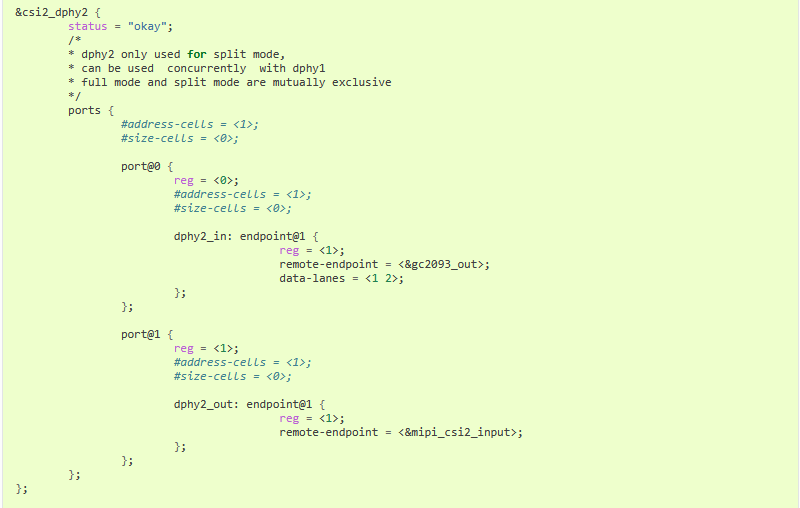
2.3.3. csi2_dphy1/csi2_dphy2相关配置
csi2_dphy0与csi2_dphy1/csi2_dphy2互斥,不可同时使用
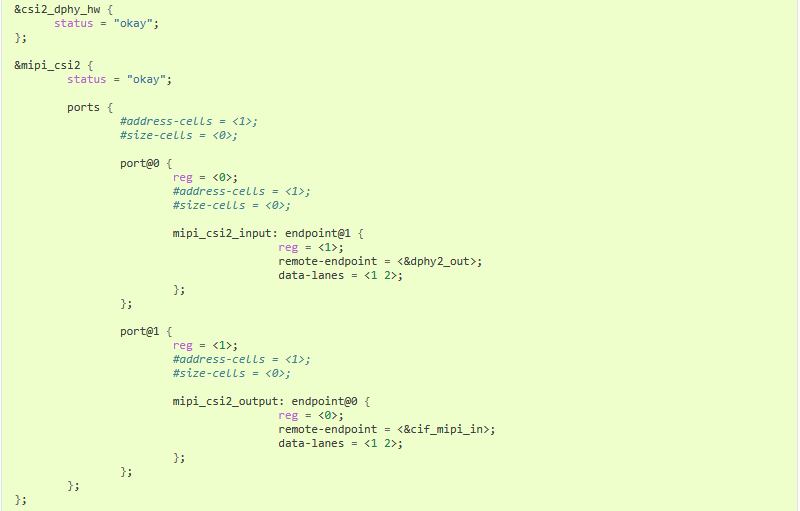
2.3.4. isp相关配置
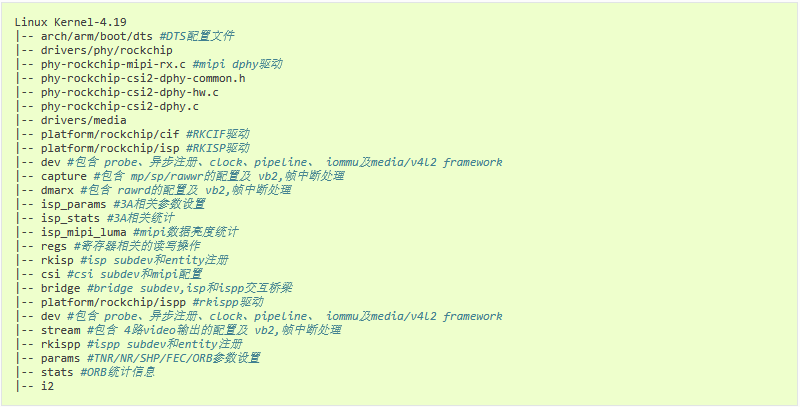
2.4. 软件相关目录
2.5. 单目CAM-8MS1M/双目CAM-2MS2MF摄像头的使用
firefly已经配置好相应的dts,单目摄像头CAM-8MS1M和双目摄像头CAM-2MS2MF使用互斥,只需包含相应的dtsi文件即可使用单目摄像头CAM-8MS1M或双目摄像头CAM-2MS2MF
Linux 已经配置好各种组合的 dts 和 mk 文件,编译前按需选择,不用修改文件
Android 需要如下修改:
2.5.1. 使用单目摄像头CAM-8MS1M
dts的配置默认使用单目摄像头
diff --git a/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts b/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts
index 7e2a8b2..14fa027 100755
--- a/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts
b/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts
@@ -7,6 7,15 @@
#include "rk3568-firefly-itx-3568q-cam-8ms1m.dtsi"
//#include "rk3568-firefly-itx-3568q-cam-2ms2m.dtsi"
2.5.2. 使用双目摄像头CAM-2MS2MF
diff --git a/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts b/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts
index 7e2a8b2..14fa027 100755
--- a/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts
b/kernel/arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q.dts
@@ -7,6 7,15 @@
- #include "rk3568-firefly-itx-3568q-cam-8ms1m.dtsi"
//#include "rk3568-firefly-itx-3568q-cam-8ms1m.dtsi"
- //#include "rk3568-firefly-itx-3568q-cam-2ms2m.dtsi"
#include "rk3568-firefly-itx-3568q-cam-2ms2m.dtsi"
2.6. Camera底层调试
使用v4l2-ctl抓取camera数据帧
v4l2-ctl --verbose -d /dev/video0 --set-fmt-video=width=1920,height=1080,pixelformat='NV12' --stream-mmap=4 --set-selection=target=crop,flags=0,top=0,left=0,width=1920,height=1080 --stream-to=/data/out.yuv
把out.yuv文件拷贝出来通过ubuntu去查看
2.8. Linux系统预览摄像头
Buildroot直接使用qcamera打开摄像头,可进行拍摄与录制,详细参考 Buildroot使用手册
Ubuntu 单目摄像头预览可以使用如下脚本:
#!/bin/bash
export DISPLAY=:0
export XAUTHORITY=/home/firefly/.Xauthority
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/aarch64-linux-gnu/gstreamer-1.0
WIDTH=1920
HEIGHT=1080
SINK=xvimagesink
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw,format=NV12,width=${WIDTH},height=${HEIGHT}, framerate=30/1 ! videoconvert ! $SINK &
wait
也可以使用之前提到的抓帧方法,抓到数据后用mpv播放:

对于双目摄像头预览,则使用如下脚本:
#!/bin/bash
export DISPLAY=:0
export XAUTHORITY=/home/firefly/.Xauthority
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/aarch64-linux-gnu/gstreamer-1.0
WIDTH=640
HEIGHT=480
SINK=xvimagesink
gst-launch-1.0 v4l2src device=/dev/video14 ! video/x-raw,format=NV12,width=${WIDTH},height=${HEIGHT}, framerate=30/1 ! videoconvert ! $SINK &
gst-launch-1.0 v4l2src device=/dev/video5 ! video/x-raw,format=NV12,width=${WIDTH},height=${HEIGHT}, framerate=30/1 ! videoconvert ! $SINK &
wait
2.9. IQ文件

若使用raw摄像头sensor,请留意isp21目录所支持的iq文件
3. CAN 使用
3.1. CAN 简介
CAN(Controller Area Network)总线,即控制器局域网总线,是一种有效支持分布式控制或实时控制的串行通信网络。CAN总线是一种在汽车上广泛采用的总线协议,被设计作为汽车环境中的微控制器通讯。 如果想了解更多的内容可以参考CAN应用报告。
注意: RK3568的CAN FD位填充功能与CAN FD标准协议不一样,不推荐使用CAN FD。
3.2. 硬件连接
CAN模块之间接线:CAN_H接CAN_H,CAN_L接CAN_L。
3.3. DTS 节点配置
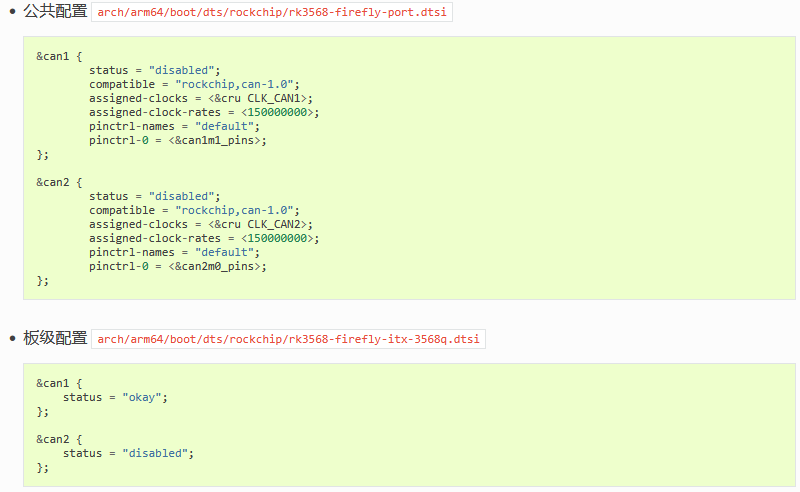
ITX-3568Q 仅引出can1,因此仅使能can1
3.4. 通信测试
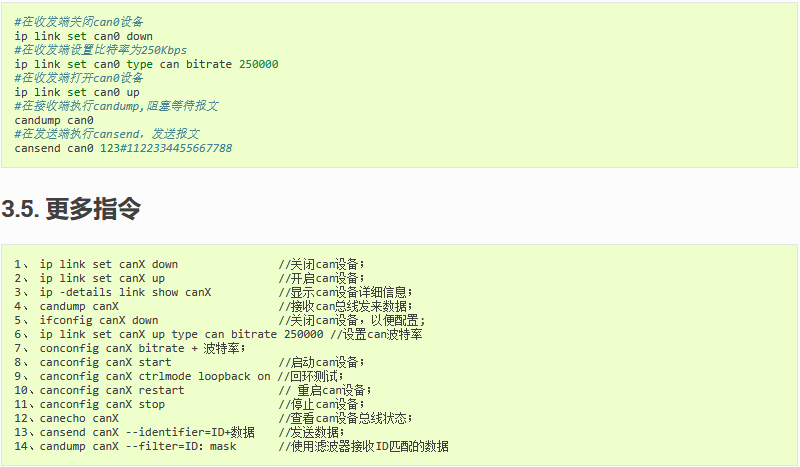
3.4.1. CAN 通信测试
使用 candump 和 cansend 工具进行收发报文测试即可,将工具push到/system/bin/目录下执行。工具可以在 官方 或者 github 下载。
3.6. FAQS
总结调试过程中遇到的几个问题及解决方法:
3.6.1. 报文发送后很久才接收到,或者接收不到。
检查总线 CAN_H 和 CAN_L, 杜邦线是否松动或者接反。
3.6.2. CAN时钟频率配置
3.6.2.1. CAN
如果CAN的比特率1M建议修改CAN时钟到300M, 信号更稳定。低于1M比特率的, 时钟设置200M就可以。
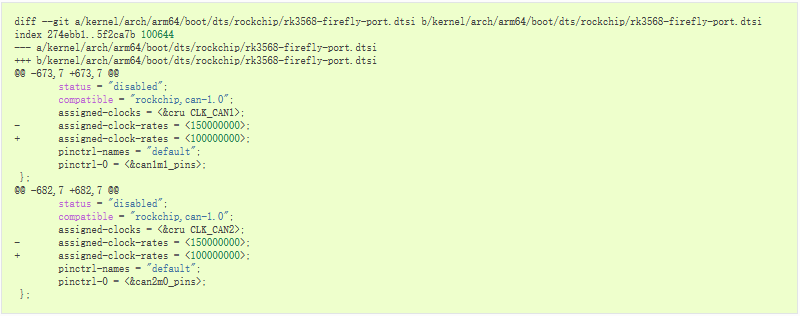
3.6.3. CAN时钟频率修改
CAN时钟频率修改方法参考如下:

4. I2C 使用
4.1. 简介
ITX-3568Q开发板上有 6 个片上 I2C 控制器,各个 I2C 的使用情况如下表:
| Port | Pin name | Device |
|---|---|---|
| I2C0 | GPIO0_B1/I2C0_SCL GPIO0_B2/I2C0_SDA |
RK809 |
| I2C1 | GPIO0_B3/I2C1_SCL GPIO0_B4/I2C1_SDA |
TP/HYM8563 |
| I2C2_M0 | GPIO0_B5/I2C2_SCL_M0 GPIO0_B6/I2C2_SDA_M0 |
复用为其他功能 |
| I2C2_M1 | GPIO4_B5/I2C2_SCL_M1 GPIO4_B4/I2C2_SDA_M1 |
VGA |
| I2C3_M0 | GPIO1_A1/I2C3_SCL_M0 GPIO1_A0/I2C3_SDA_M0 |
复用为其他功能 |
| I2C3_M1 | GPIO3_B5/I2C3_SCL_M1 GPIO3_B6/I2C3_SDA_M1 |
复用为其他功能 |
| I2C4_M0 | GPIO4_B3/I2C4_SCL_M0 GPIO4_B2/I2C4_SDA_M0 |
camera |
| I2C4_M1 | GPIO2_B2/I2C4_SCL_M1 GPIO2_B1/I2C4_SDA_M1 |
复用为其他功能 |
| I2C5_M0 | GPIO3_B3/I2C5_SCL_M0 GPIO3_B4/I2C5_SDA_M0 |
复用为其他功能 |
| I2C5_M1 | GPIO4_C7/I2C5_SCL_M1 GPIO4_D0/I2C5_SDA_M1 |
复用为其他功能 |
本文主要描述如何在该开发板上配置 I2C。
配置 I2C 可分为两大步骤:
-
定义和注册 I2C 设备
-
定义和注册 I2C 驱动
下面以配置 GSL3680 为例。
4.2. 定义和注册 I2C 设备
在注册 I2C 设备时,需要结构体 i2c_client 来描述 I2C 设备。然而在标准 Linux 中,用户只需要提供相应的 I2C 设备信息,Linux 就会根据所提供的信息构造 i2c_client 结构体。
用户所提供的 I2C 设备信息以节点的形式写到 DTS 文件中,如下所示:
4.3. 定义和注册 I2C 驱动
4.3.1. 定义 I2C 驱动

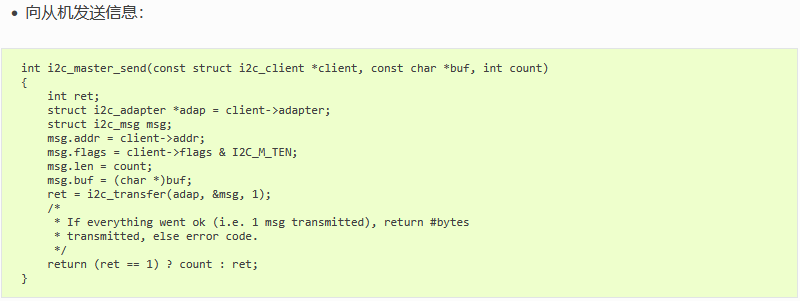
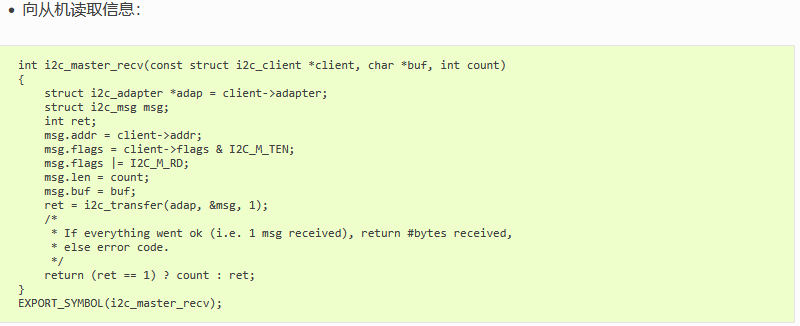
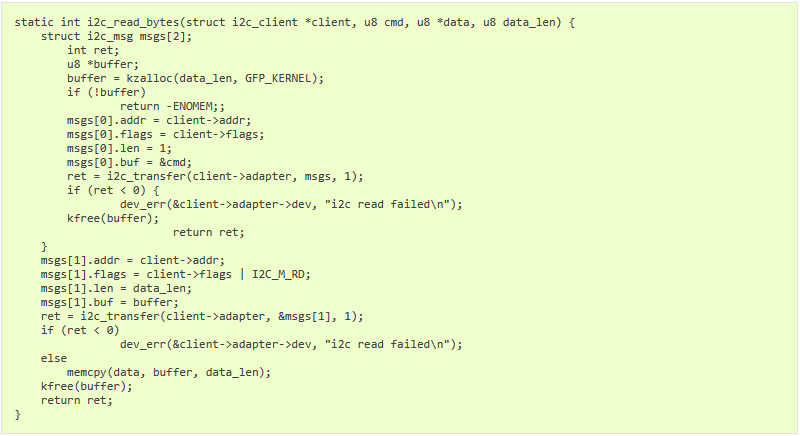
4.3.3. 通过 I2C 收发数据
在注册好 I2C 驱动后,即可进行 I2C 通讯。
4.4. FAQs
4.4.1. Q1: 通信失败,出现这种 log: “timeout, ipd: 0x00, state: 1” 该如何调试?
A1: 请检查硬件上拉是否给电。
4.4.2. Q2: 调用 i2c_transfer 返回值为 -6?
A2: 返回值为 -6 表示为 NACK 错误,即对方设备无应答响应,这种情况一般为外设的问题,常见的有以下几种情况:
-
I2C 地址错误,解决方法是测量 I2C 波形,确认是否 I2C 设备地址错误;
-
I2C slave 设备不处于正常工作状态,比如未给电,错误的上电时序等;
-
时序不符合 I2C slave 设备所要求也会产生 Nack 信号。
4.4.3. Q3: 当外设对于读时序要求中间是 stop 信号不是 repeat start 信号的时候,该如何处理?
A3: 这时需要调用两次 i2c_transfer, I2C read 拆分成两次,修改如下:
5. LCD使用
5.1. Config配置

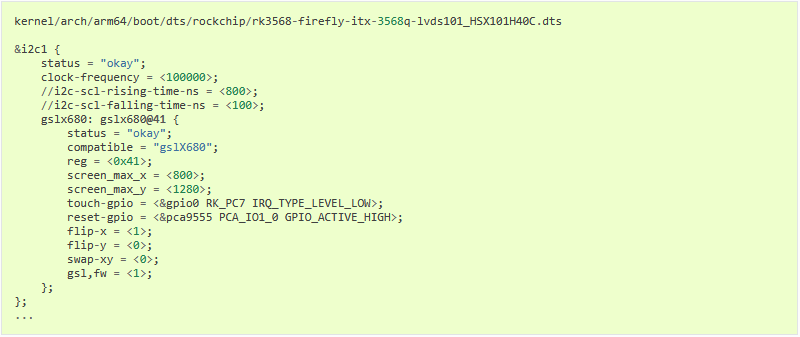
5.2. MIPI DTS配置
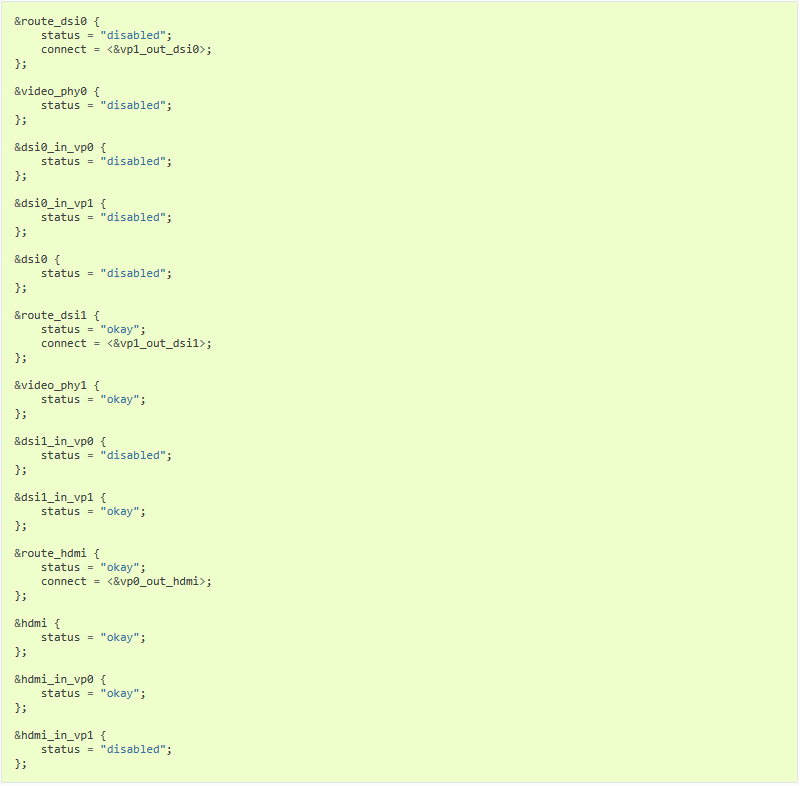
vp 是视频接口的意思,这一段表示 DSI0 关闭,DSI1 开启并使用 vp1,HDMI 开启并使用 vp0
DSI1 和 HDMI 交换 vp 也是可以的,要保证不同的屏幕需要使用不同的 vp
5.2.2. 引脚配置
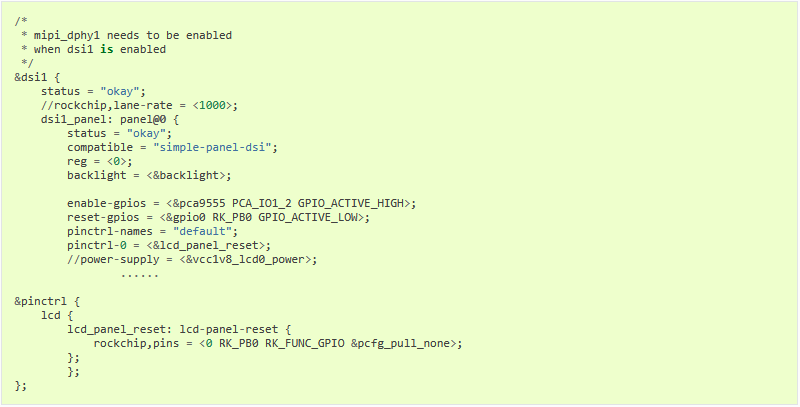
这里定义了LCD的控制引脚:
| NAME | GPIO | GPIO_ACTIVE |
|---|---|---|
| enable-gpios(LCD_EN) | PCA_IO1_2 | GPIO_ACTIVE_HIGH |
| reset-gpios(LCD_RST) | GPIO0_B0 | GPIO_ACTIVE_LOW |
在硬件信号上LCD_EN引脚高电平有效,而LCD_RST引脚是低电平有效,具体的引脚配置请参考《GPIO 使用》一节。需要注意的是ITX-3568Q的dsi1中,LCD_EN:(PCA_IO1_2)使用的是PCA9555扩展芯片引出来的gpio,需要PCA9555 驱动起来以后才能控制该gpio。
5.2.3. 背光配置
在DTS文件中配置了背光信息,如下:
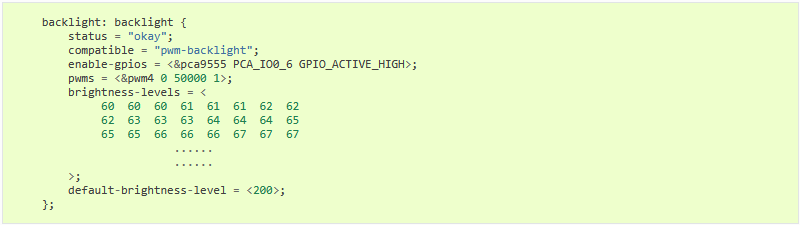

mipi-data-delay-ms为10.1寸 M101014-BE45-A1 MIPI屏所需时序,调试屏幕时可根据本身上下电时序是否需要再配置此属性。MIPI上下电后需要发送初始化或退出指令才能使之正常工作,列表如下:
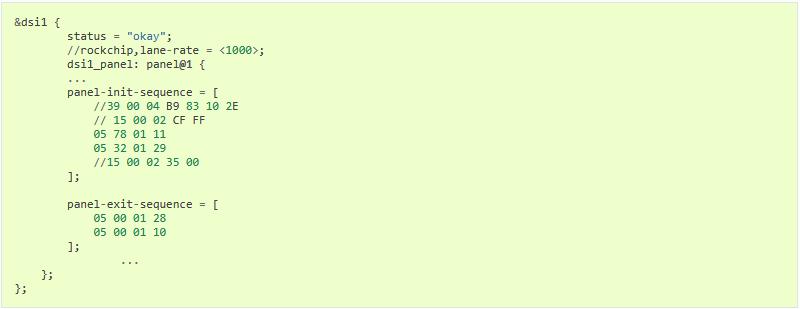
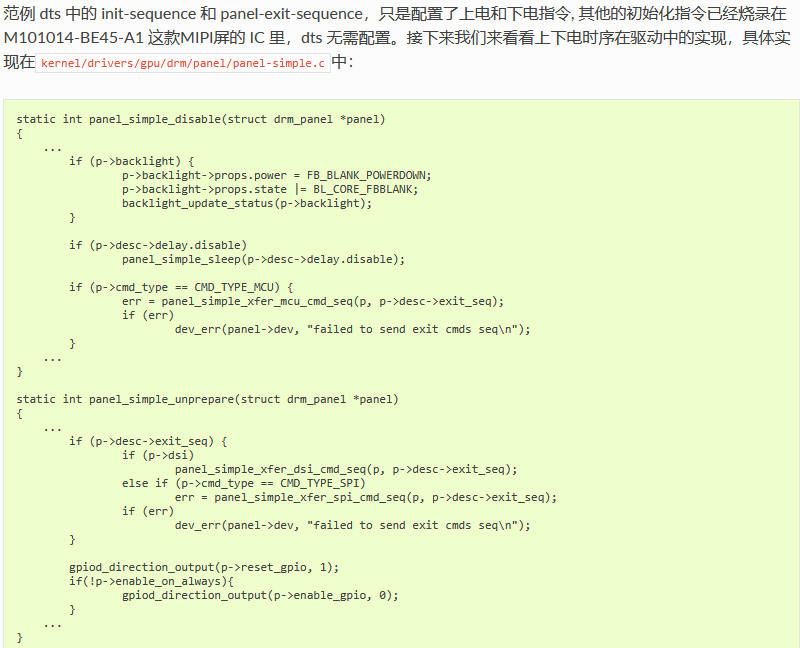
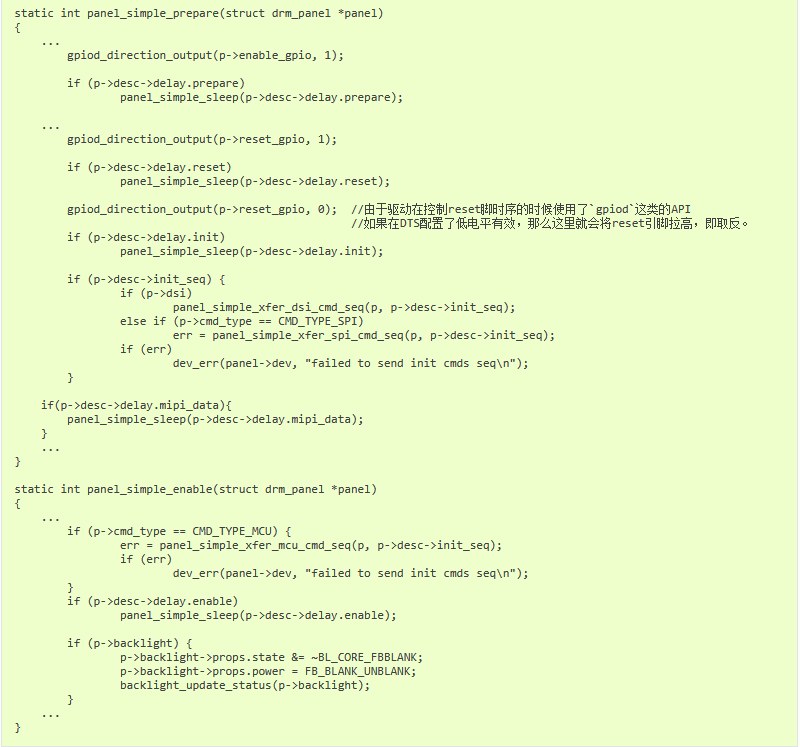

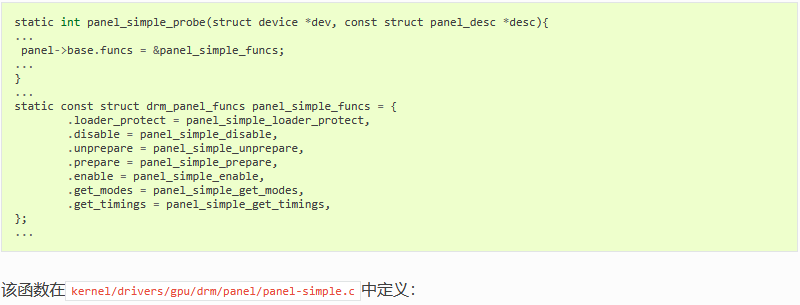
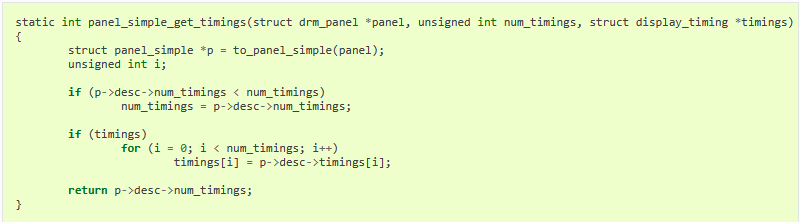
详细说明可参考以下附件: Rockchip DRM Panel Porting Guide.pdf
6. Ethernet 使用
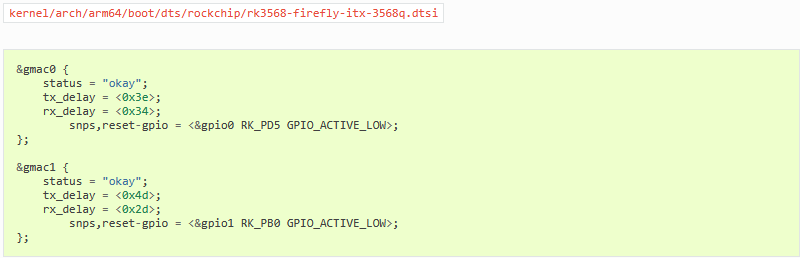
6.1. dts 配置
6.1.1. 公共的配置
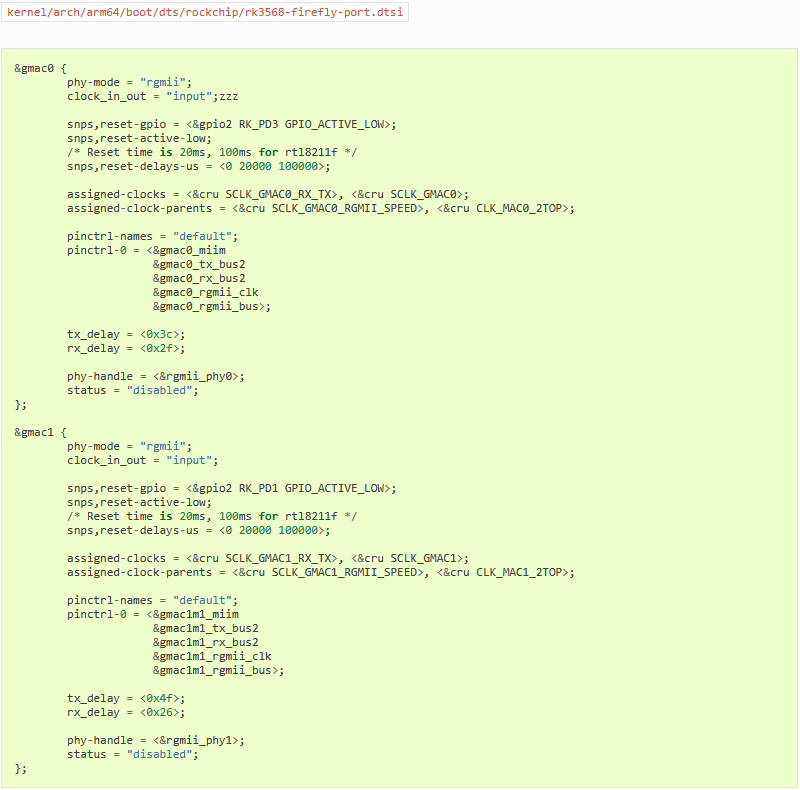
6.1.2. 板级的配置
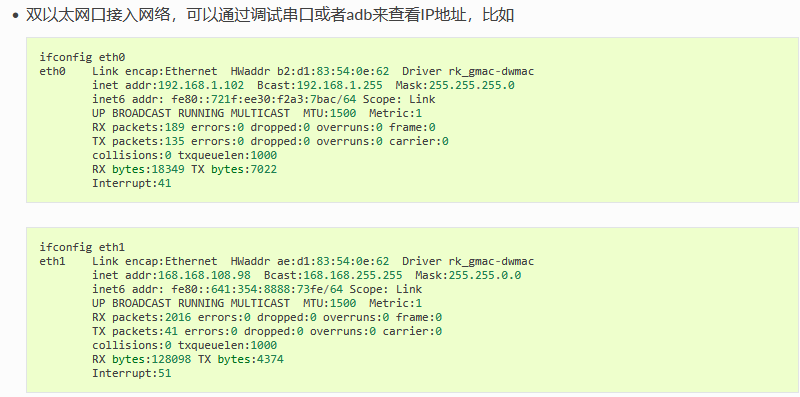
6.2. Android双以太网的使用
此设备的双以太网口分内网和外网。 内网又称局域网(Local Area Network,LAN,是指在某一区域内由多台计算机以及网络设备构成的网络,无法连通外部网络;外网为广域网,又称公网,是连接不同地区局域网或城域网计算机通信的远程网,可以连通外部网络,如访问百度,搜狗。
-
eth0 : 副网口,用于内网
-
eth1 : 主网口,用于外网
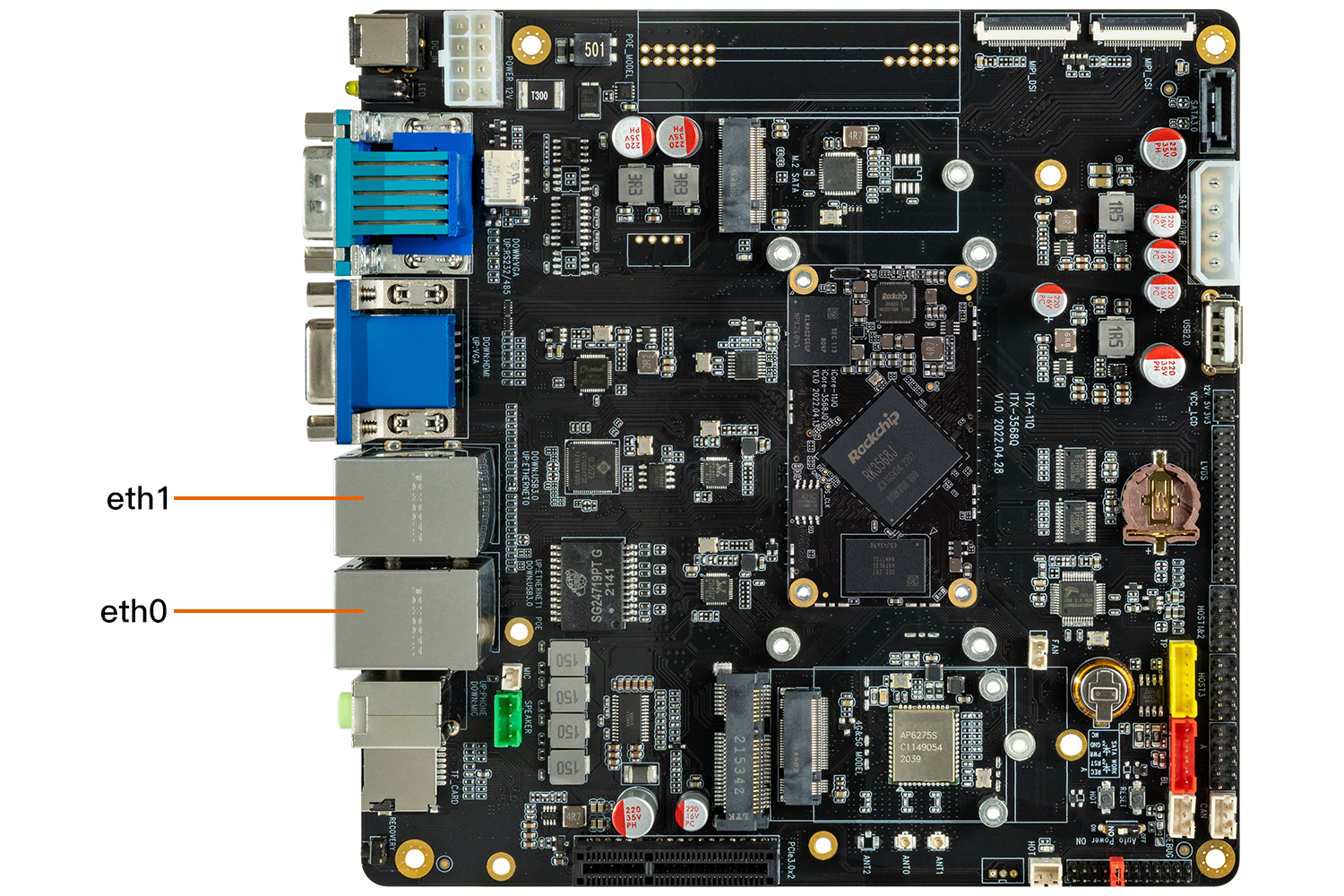
Android 系统Settings -> Network & internet -> Ethernet/Ethernet2, 可以查看主副网口的 IP 地址。
6.2.1. 查看IP地址
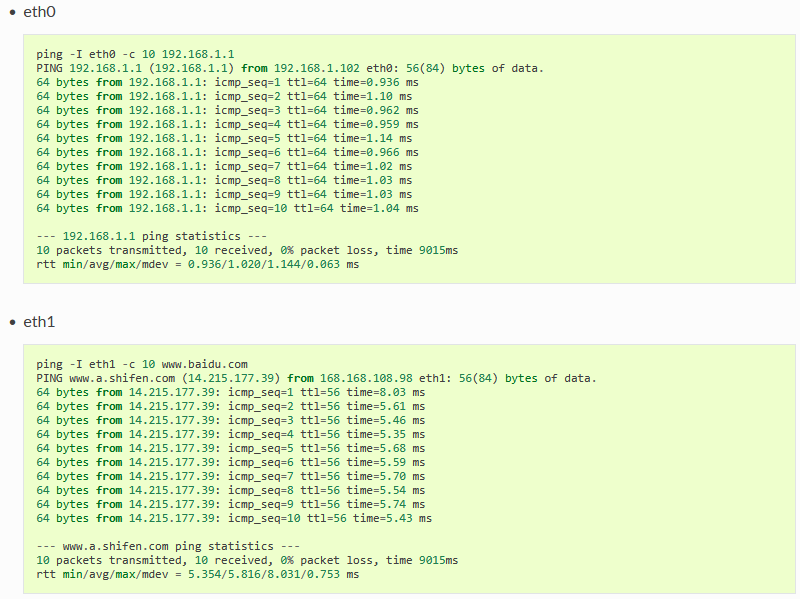
6.2.2. 连通性测试
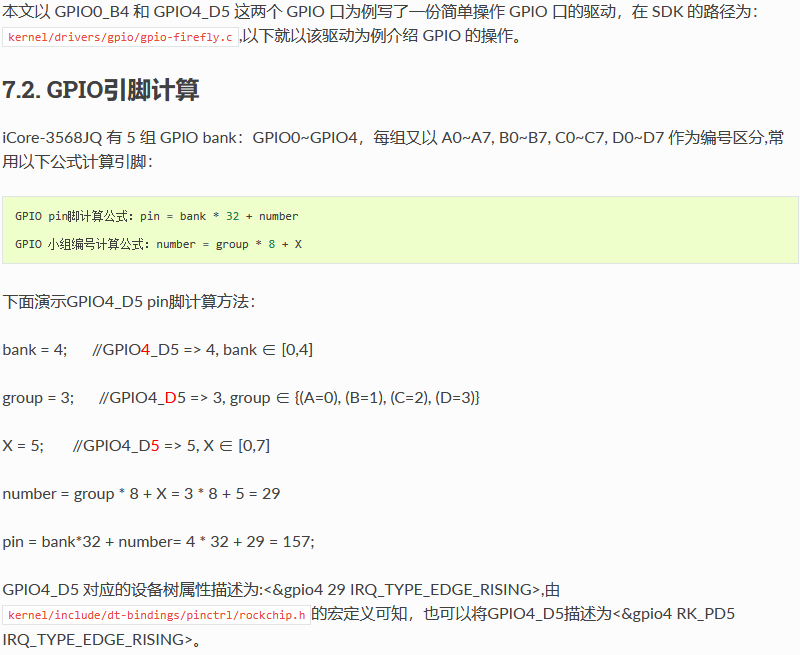
7. GPIO 使用
7.1. 简介
GPIO, 全称 General-Purpose Input/Output(通用输入输出),是一种软件运行期间能够动态配置和控制的通用引脚。 所有的 GPIO 在上电后的初始状态都是输入模式,可以通过软件设为上拉或下拉,也可以设置为中断脚,驱动强度都是可编程的,其核心是填充 GPIO bank 的方法和参数,并调用 gpiochip_add 注册到内核中。
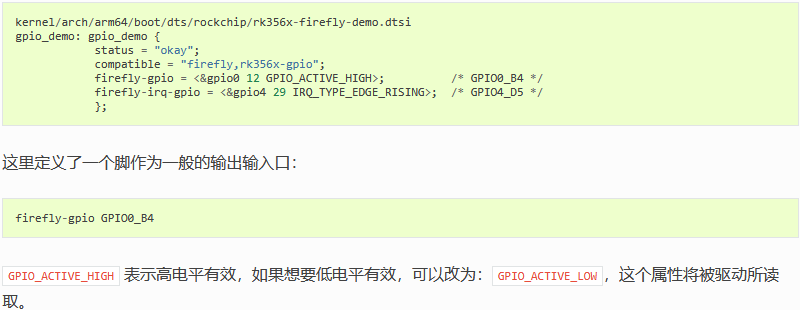
7.3. 输入输出
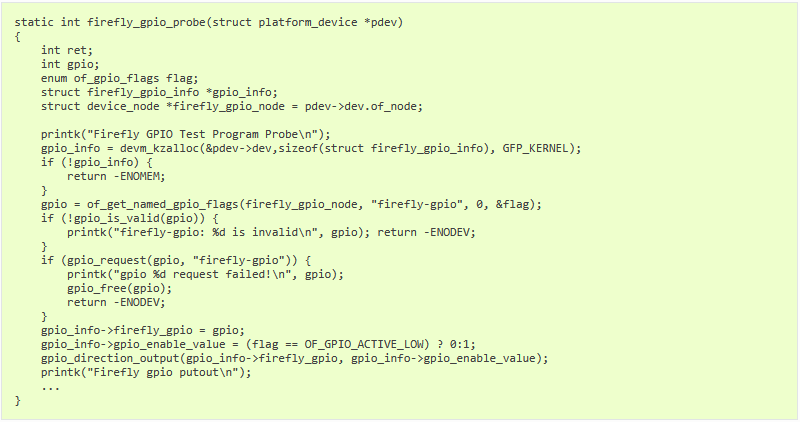
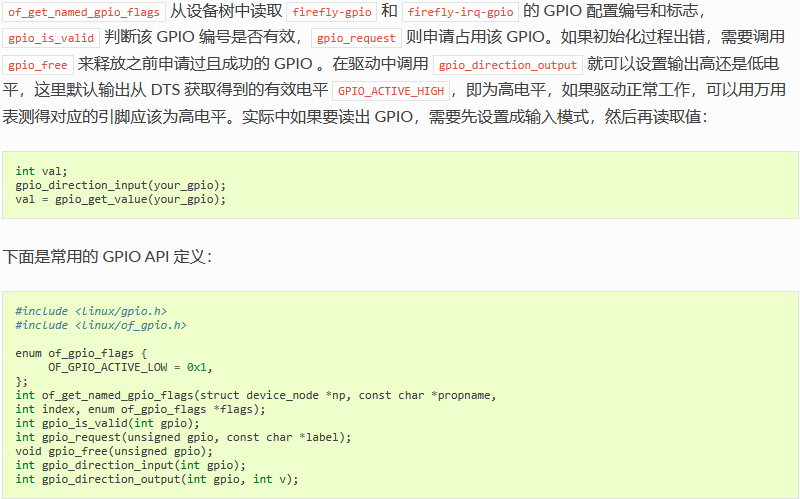
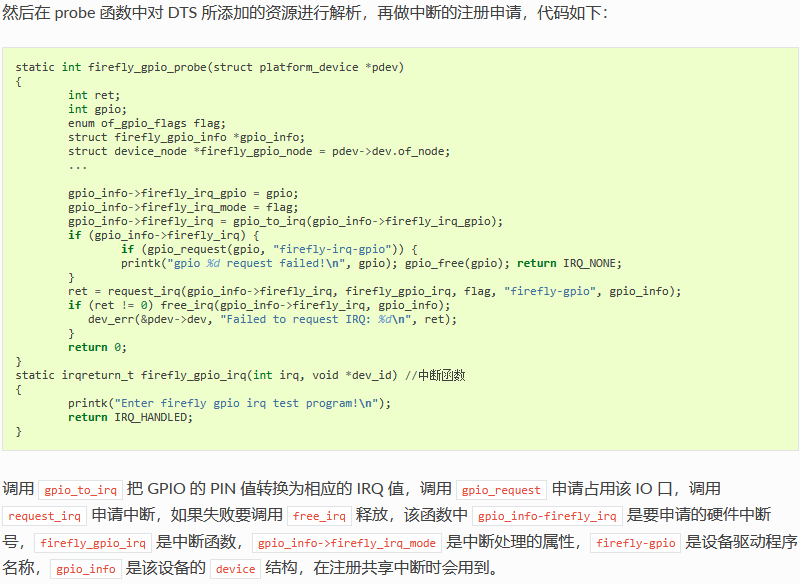
首先在 DTS 文件中增加驱动的资源描述:
然后在 probe 函数中对 DTS 所添加的资源进行解析,代码如下:
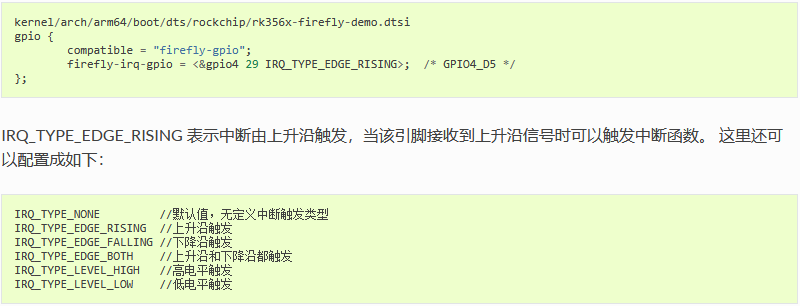
7.4. 中断
在 Firefly 的例子程序中还包含了一个中断引脚,GPIO 口的中断使用与 GPIO 的输入输出类似,首先在 DTS 文件中增加驱动的资源描述:
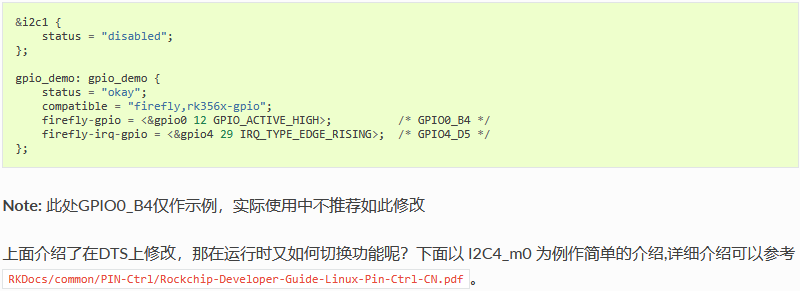
7.5. 复用
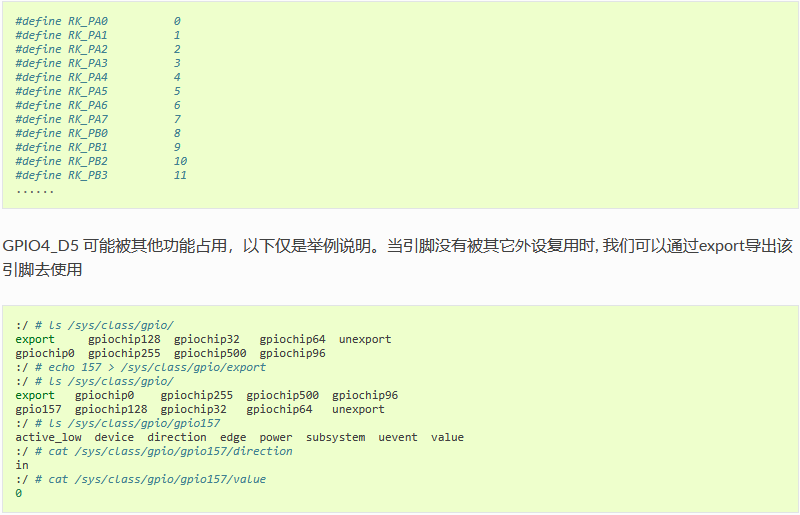
GPIO 口除了通用输入输出、中断功能外,还可能有其它复用功能,如GPIO0_B4, 就有如下几个功能:
| func0 | func1 | func2 | func3 | func4 |
|---|---|---|---|---|
| GPIO0_B4 | I2C1_SDA | CAN0_RX_M0 | PCIE20_BUTTONRSTn | MCU_JTAG_TCK |
那么在使用作GPIO口时,就需要注意是否被复用为其他功能了,这里可以用io命令查看iomux来判断是否复用,在调试方法的章节中有相关说明,这里不多作说明。 假如通过io命令发现GPIO0_B4有复用作I2C1_SDA,使用GPIO0_B4作gpio或者其他功能时就需要将I2C1 disabled掉。
查规格表可知,I2C4_SDA_M0 与 I2C4_SCL_M0 的功能定义如下:
| Pad# | func0 | func1 | func2 | func3 | func4 | func5 |
|---|---|---|---|---|---|---|
| I2C4_SDA_M0/GPIO4_B2 | GPIO4_B2 | I2C4_SDA | EBC_VCOM | GMAC1_RXER_M1 | SPI3_MOSI_M0 | I2S2_SDI_M1 |
| I2C4_SCL_M0/GPIO4_B3 | GPIO4_B3 | I2C4_SDA | EBC_GDOE | ETH1_REFCLKO_25MM1 | SPI3_CLK_M0 | I2S2_SDO_M1 |
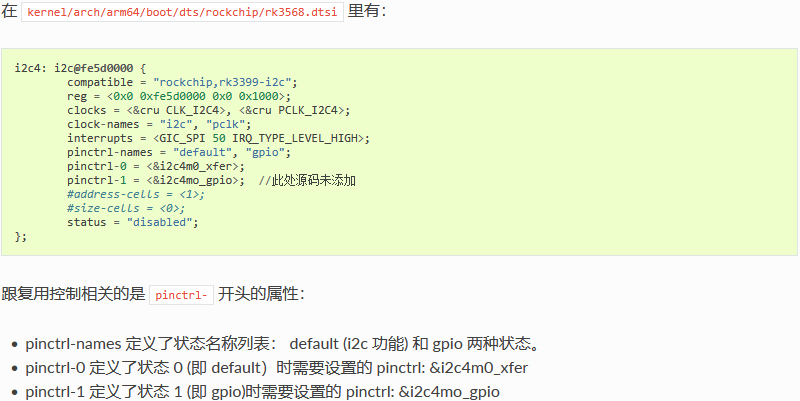
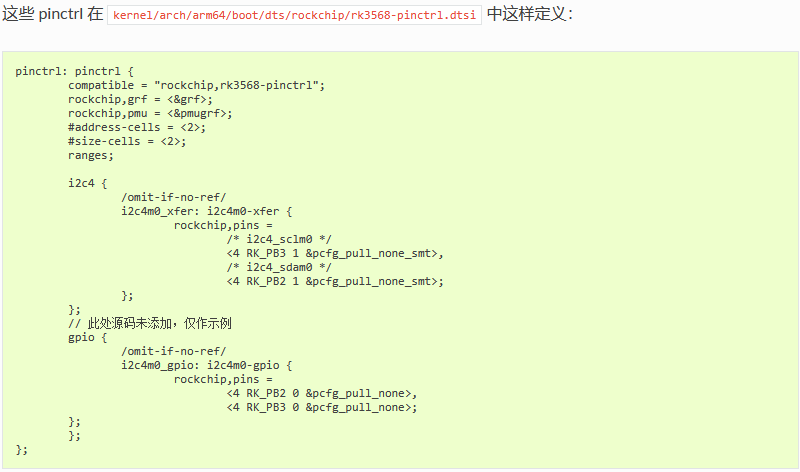
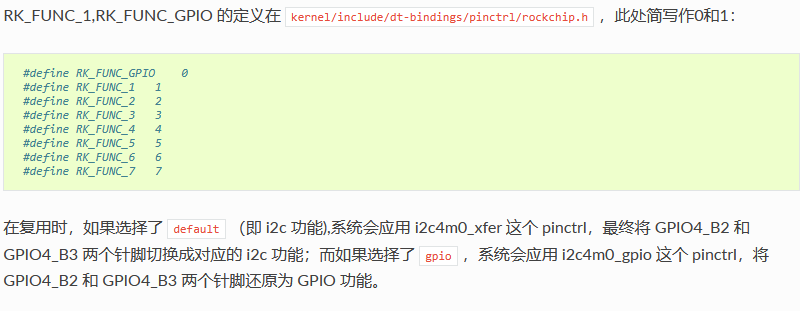
我们看看如下 i2c 的驱动程序是如何切换复用功能的:
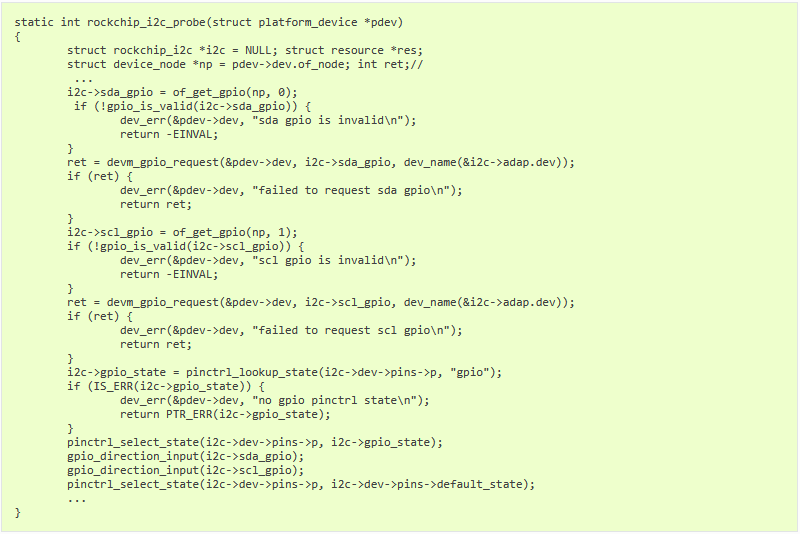
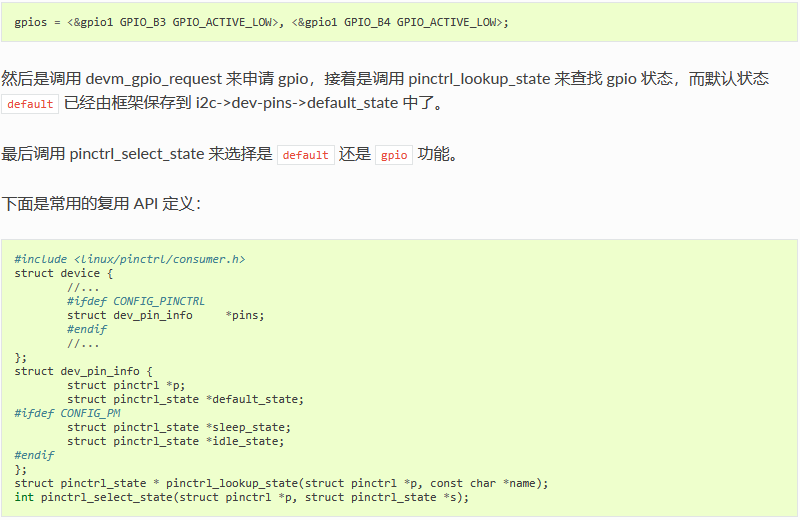
首先是调用 of_get_gpio 取出设备树中 i2c4 结点的 gpios 属于所定义的两个 gpio:
7.6. FAQs
7.6.1. Q1: 如何将 PIN 的 MUX 值切换为一般的 GPIO?
A1: 当使用 GPIO request 时候,会将该 PIN 的 MUX 值强制切换为 GPIO,所以使用该 PIN 脚为 GPIO 功能的时候确保该 PIN 脚没有被其他模块所使用。
7.6.2. Q2: 为什么我用 IO 指令读出来的值都是 0x00000000?
A2: 如果用 IO 命令读某个 GPIO 的寄存器,读出来的值异常,如 0x00000000 或 0xffffffff 等,请确认该 GPIO 的 CLK 是不是被关了,GPIO 的 CLK 是由 CRU 控制,可以通过读取 datasheet 下面 CRU_CLKGATE_CON* 寄存器来查到 CLK 是否开启,如果没有开启可以用 io 命令设置对应的寄存器,从而打开对应的 CLK,打开 CLK 之后应该就可以读到正确的寄存器值了。
7.6.3. Q3: 测量到 PIN 脚的电压不对应该怎么查?
A3: 测量该 PIN 脚的电压不对时,如果排除了外部因素,可以确认下该 PIN 所在的 IO 电压源是否正确,以及 IO-Domain 配置是否正确。
7.6.4. Q4: gpio_set_value() 与 gpio_direction_output() 有什么区别?
A4: 如果使用该 GPIO 时,不会动态的切换输入输出,建议在开始时就设置好 GPIO 输出方向,后面拉高拉低时使用 gpio_set_value() 接口,而不建议使用 gpio_direction_output(), 因为 gpio_direction_output 接口里面有 mutex 锁,对中断上下文调用会有错误异常,且相比 gpio_set_value,gpio_direction_output 所做事情更多,浪费。
8. LED 使用
8.1. 前言
ITX-3568Q开发板上有 2 个 LED 灯,如下表所示:
| LED | Pin name | Pin number |
|---|---|---|
| Blue | GPIO0_B6 | 14 |
| Yellow | GPIO4_C4 | 148 |
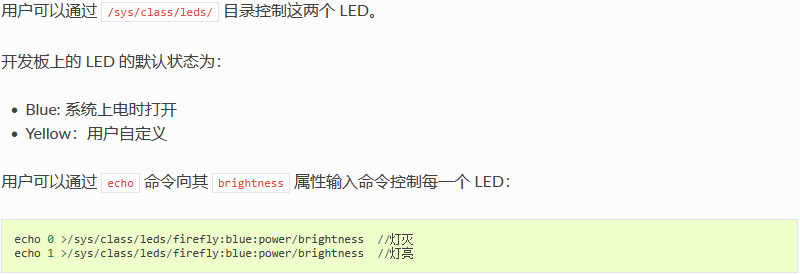
可通过使用 LED 设备子系统或者直接操作 GPIO 控制该 LED。
8.2. 以设备的方式控制 LED
标准的 Linux 专门为 LED 设备定义了 LED 子系统。 在 ITX-3568Q开发板中的两个 LED 均以设备的形式被定义。
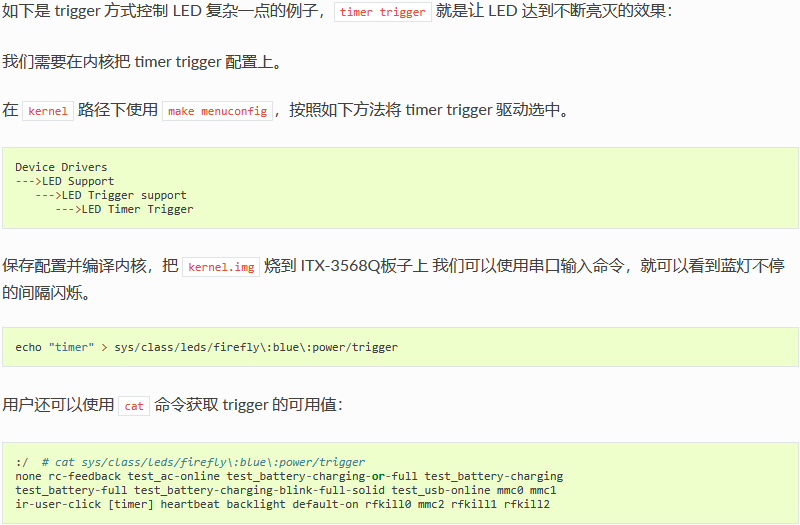
8.3. 使用 trigger 方式控制 LED
Trigger 包含多种方式可以控制 LED,这里就用两个例子来说明。

8.3.1. Simple trigger LED
按名字来是看就是简单的触发方式控制 LED,如下就默认打开黄灯,ITX-3568Q开机后黄灯就亮。

8.3.2. Complex trigger LED
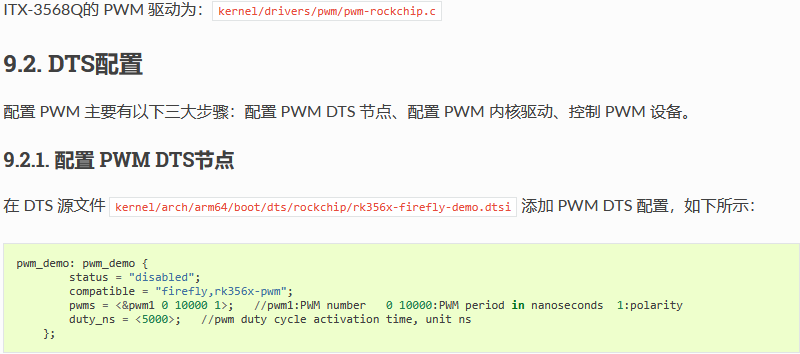
9. PWM 使用
9.1. 前言
本章主要描述如何配置 PWM。
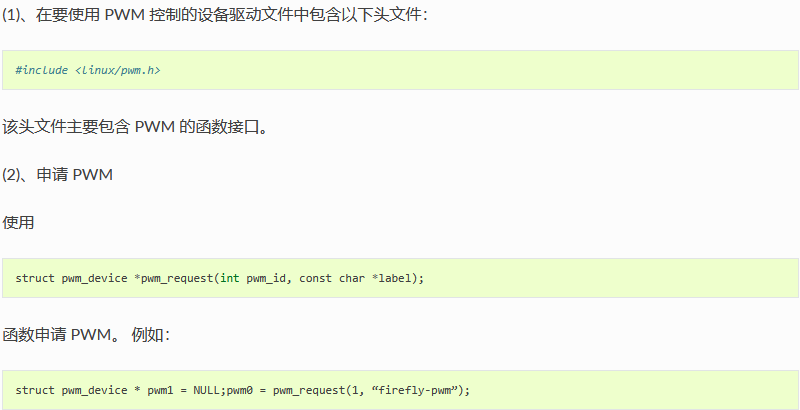
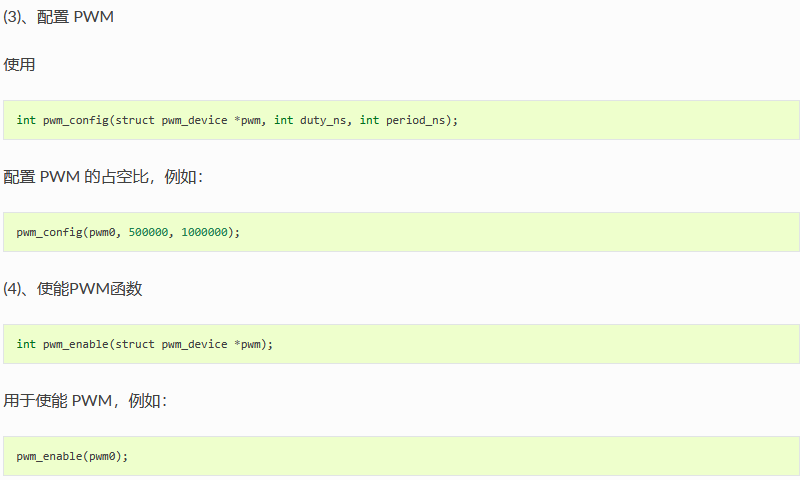
9.3. 接口说明
用户可在其它驱动文件中使用以上步骤生成的 PWM 节点。具体方法如下:

9.4. 调试方法

查看注册是否成功,成功则返回接口名和寄存器地址。
9.5. FAQs
9.5.1. PWM 无法注册成功:
-
dts 配置文件是否打开对应的 PWM。
-
PWM 所在的 IO 口是否被其他资源占用,可以根据报错的返回值去查看原因。
10. RTC 使用
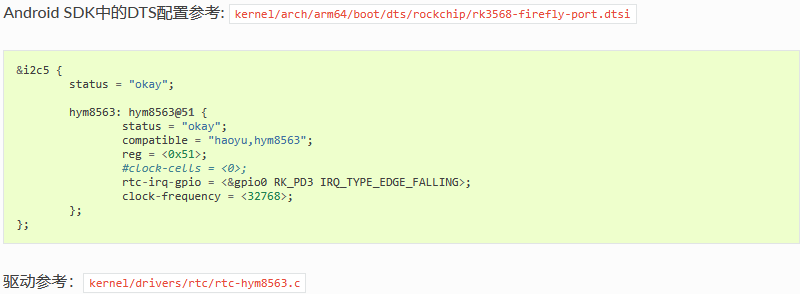
10.1. 简介
ITX-3568Q开发板采用HYM8563作为RTC(Real Time Clock),HYM8563是一款低功耗CMOS实时时钟/日历芯片,它提供一个可编程的时钟输出,一个中断 输出和一个掉电检测器,所有的地址和数据都通过I2C总线接口串行传递。最大总线速度为 400Kbits/s,每次读写数据后,内嵌的字地址寄存器会自动递增
-
可计时基于 32.768kHz 晶体的秒,分,小时,星期,天,月和年
-
宽工作电压范围:1.0~5.5V
-
低休眠电流:典型值为 0.25μA(VDD =3.0V, TA =25°C)
-
内部集成振荡电容
-
漏极开路中断引脚
10.2. RTC驱动
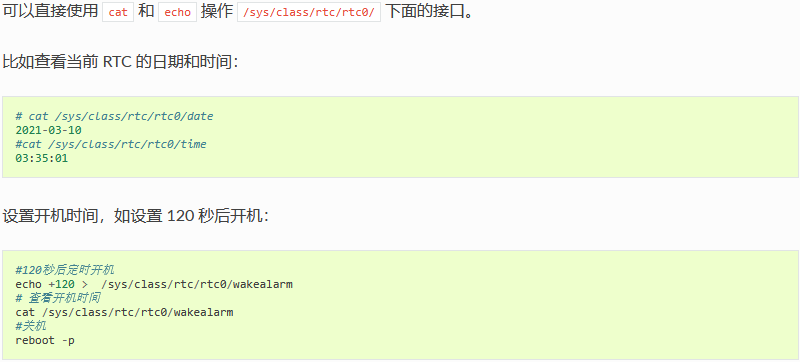
10.3. 接口使用
Linux 提供了三种用户空间调用接口。在 ITX-3568Q开发板中对应的路径为:
-
SYSFS接口:/sys/class/rtc/rtc0/
-
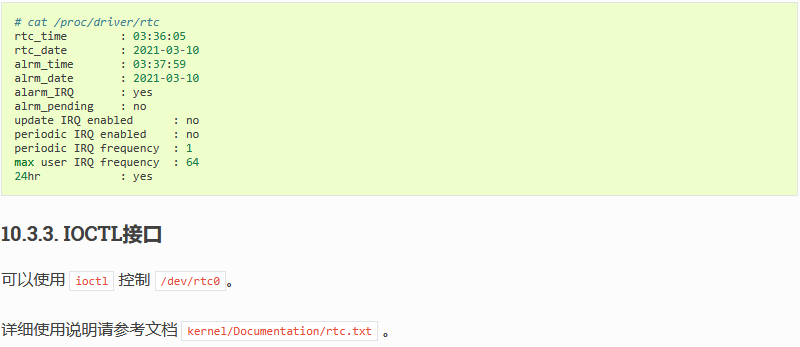
PROCFS接口: /proc/driver/rtc
-
IOCTL接口: /dev/rtc0
10.3.1. SYSFS接口
10.3.2. PROCFS 接口
打印 RTC 相关的信息:
10.4. FAQs
10.4.1. Q1: 开发板上电后时间不同步?
A1: 检查一下 RTC 电池是否正确接入。
11. UART 使用
11.1. 简介
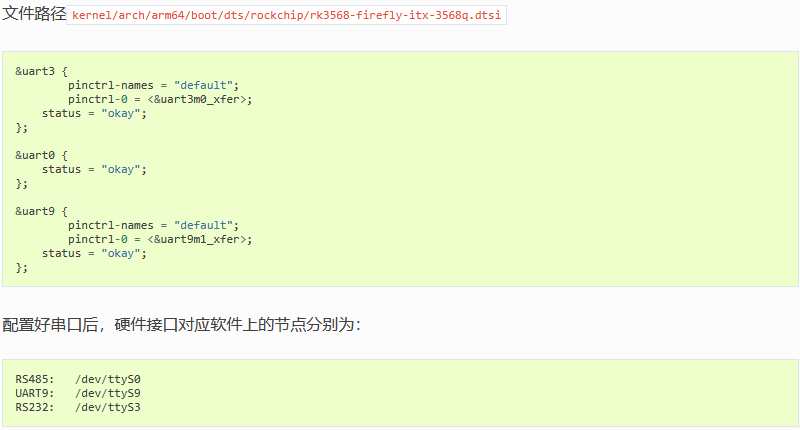
ITX-3568Q支持UART、RS232、RS485接口
-
UARTx1
-
RS485x1
-
RS232x1
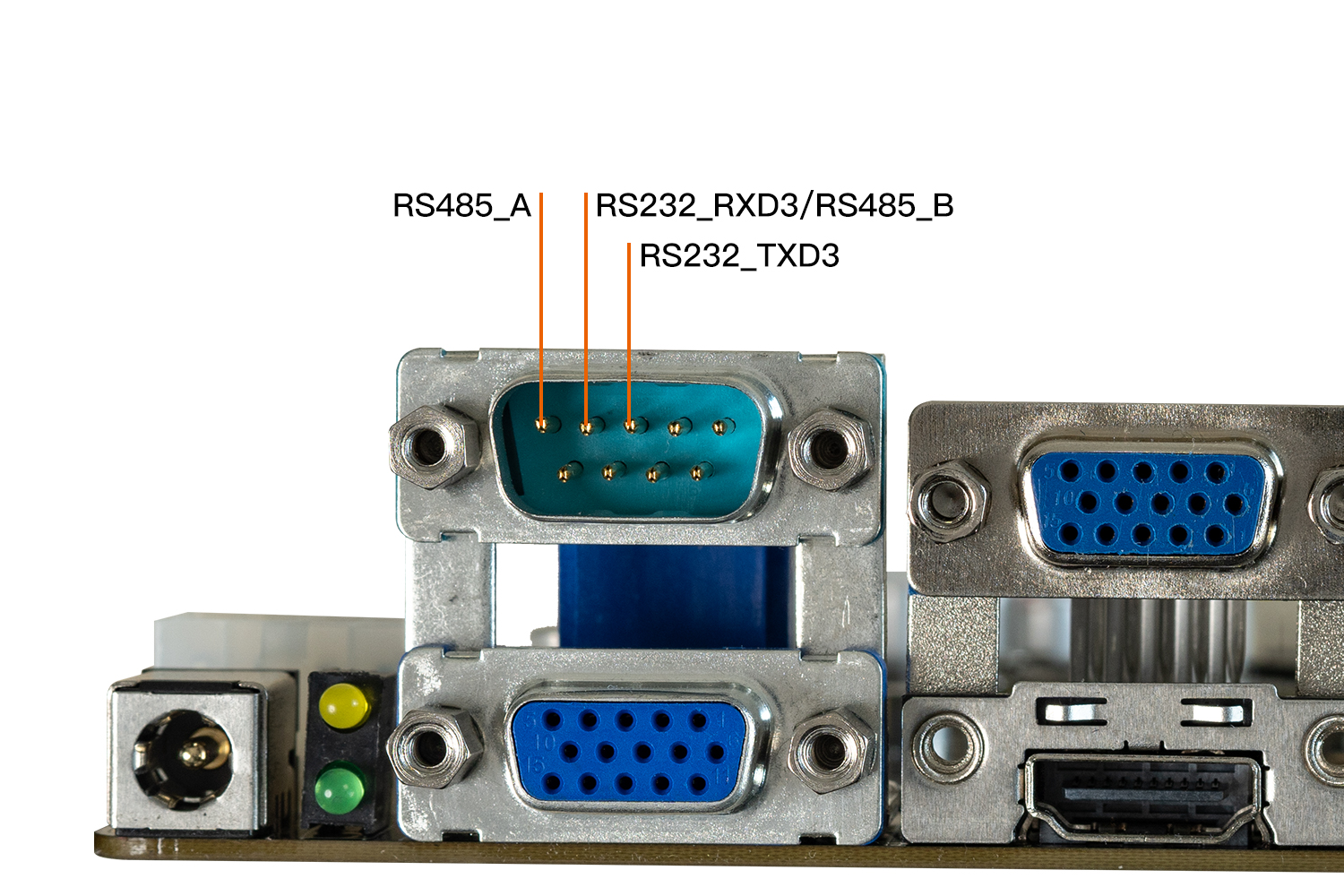
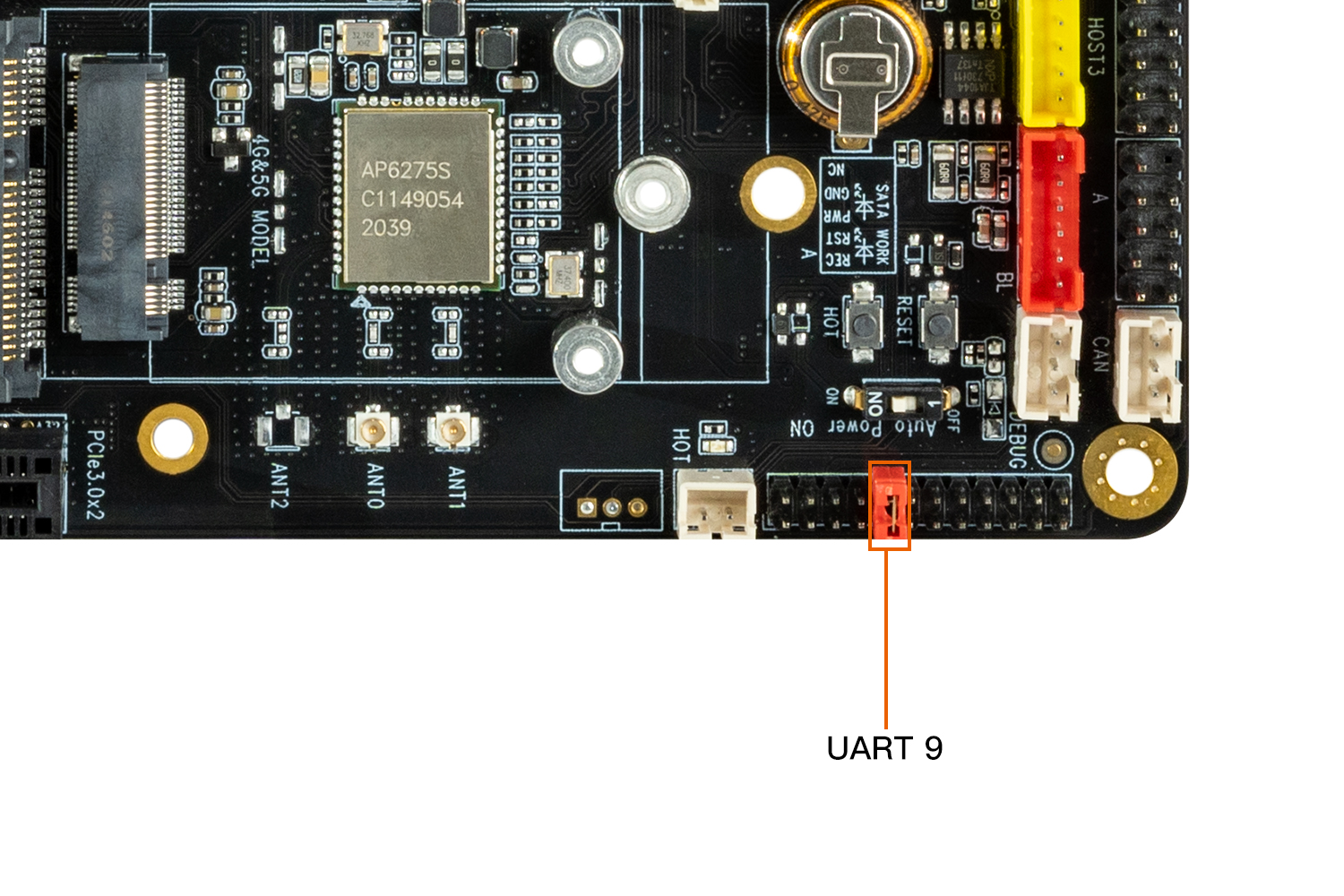
其中开发板的 RS232 接口由主控的 uart3 扩展出来,RS485 是由 uart0 扩展出来,UART 则是 uart9
11.2. DTS配置
11.3. PIN 脚定义
-
RS232 & RS485
-
-
UART9
-
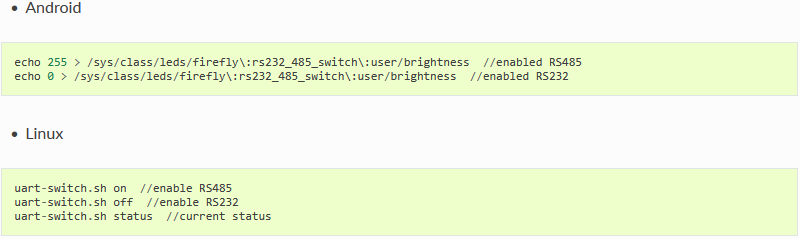
11.4. RS232/RS485 使用说明
使用如下指令切换RS485/RS232:
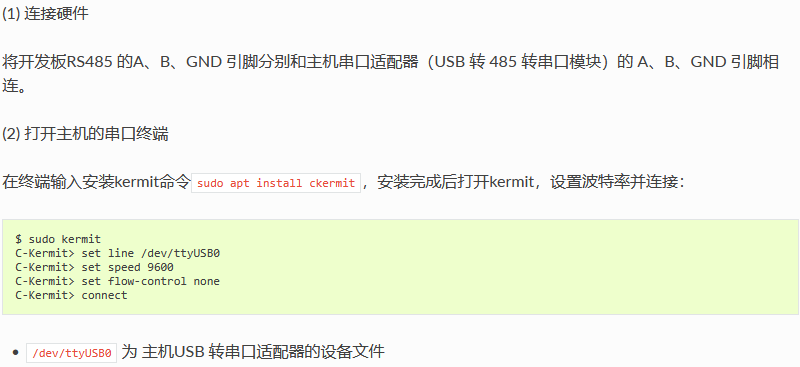
11.5. 调试方法
用户可以根据不同的接口使用不同的主机的 USB 转串口适配器向开发板的串口收发数据,例如 RS485 的调试步骤如下:

12. Watchdog 使用
12.1. 简介
看门狗(watchdog)实际是一个定时器,启动之后会开始计时,系统或者软件需要在规定时间内与看门狗通信(俗称喂狗)重置计时,如此反复下去,以此来确定系统和软件正常运行。
如果规定时间内没有喂狗,看门狗超时,说明系统或应用陷入循环、卡死,此时看门狗会发出复位信号让主控复位,脱离卡死。
iCore-3568JQ 带有一个内部看门狗和一个外部看门狗,外部看门狗的型号为:PC9202
12.2. 内部看门狗
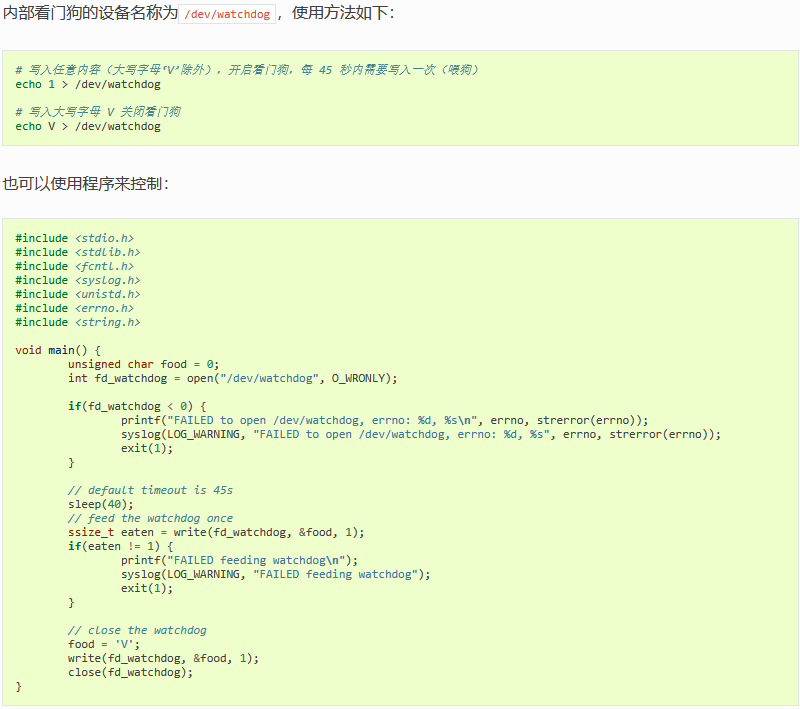
注意事项: 内部看门狗在使用 open 函数打开后会立刻开始计时
参考文档:SDK/RKDocs(linux 为 docs)/common/watchdog
12.3. 外部看门狗

外部看门狗同样可以用程序控制,写法和内部看门狗一样,只需要修改设备名称和写入的内容
注意事项:
-
外部看门狗在使用 open 函数打开后不会开始计时,必须要写入数字才开始
-
外部看门狗只支持写入数字 0,1,2,3
-
目前 iCore-3568JQ v1.0 版本,外部看门狗开启后无法软件关闭,需要断电才能关闭
-
因此,如果开启外部看门狗之后想要烧写固件,请按住 recovery 断开电源再连接进入 loader 模式,使用 reboot loader 命令进入可能会被看门狗重启
配件
1. 串口模块

2. 屏幕模组
2.1. DM-M10R800 V2 MIPI屏模组
2.1.1. 产品参数
-
型号:M101014_BE45_A1
-
尺寸:10.1 寸
-
分辨率:800x1280
-
显示接口:MIPI
-
可视角度:160°
-
触摸屏:多点电容触摸
2.1.2. 参考固件
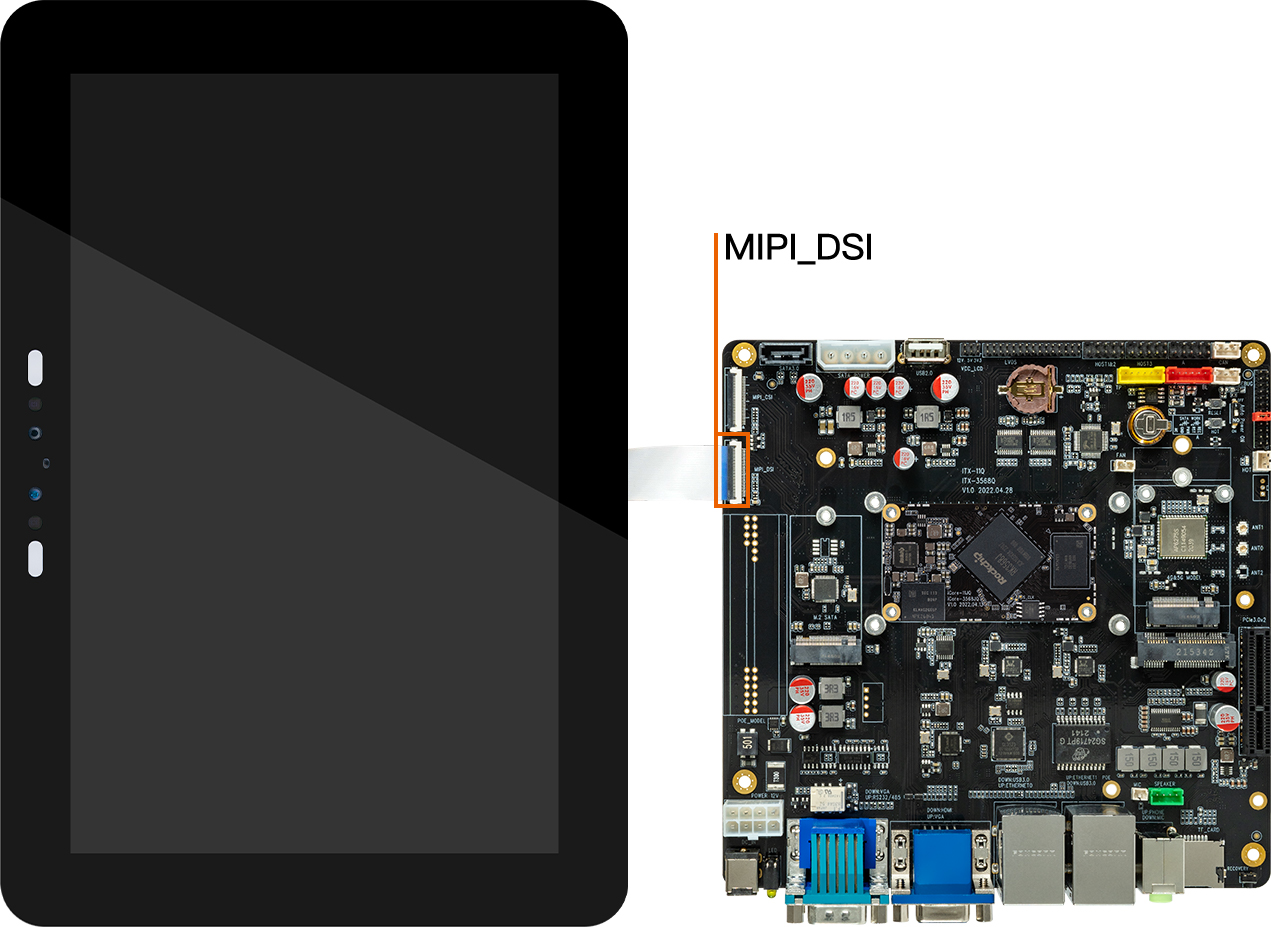
官方的 MIPI 固件默认支持 MIPI_DSI1 HDMI显示,MIPI屏连接 ITX-3568Q 的MIPI_DSI1接口,下面是固件的链接:固件链接
注意: 接入HDMI时,HDMI的两边有可能会有黒边的现象,这是因为HDMI作为副屏会根据主屏MIPI的宽高比进行缩放,如果两者的宽高比不一致,就会导致黒边。
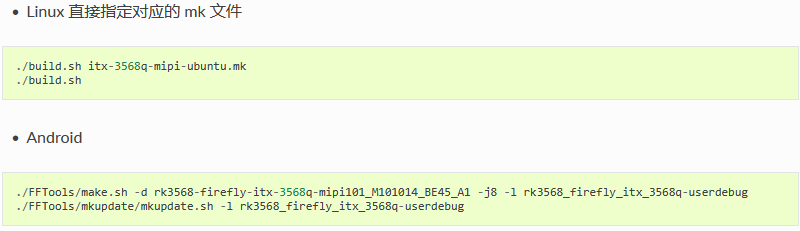
2.1.3. 编译命令
用官网 SDK 编译支持的 10.1 寸屏的固件时使用以下命令:
注意:如果需要支持 CAM-8MS1M 摄像头模组,需要先做如下修改,再编译。
2.1.4. 参考资料
2.1.5. 连接方式
3. 摄像头模组
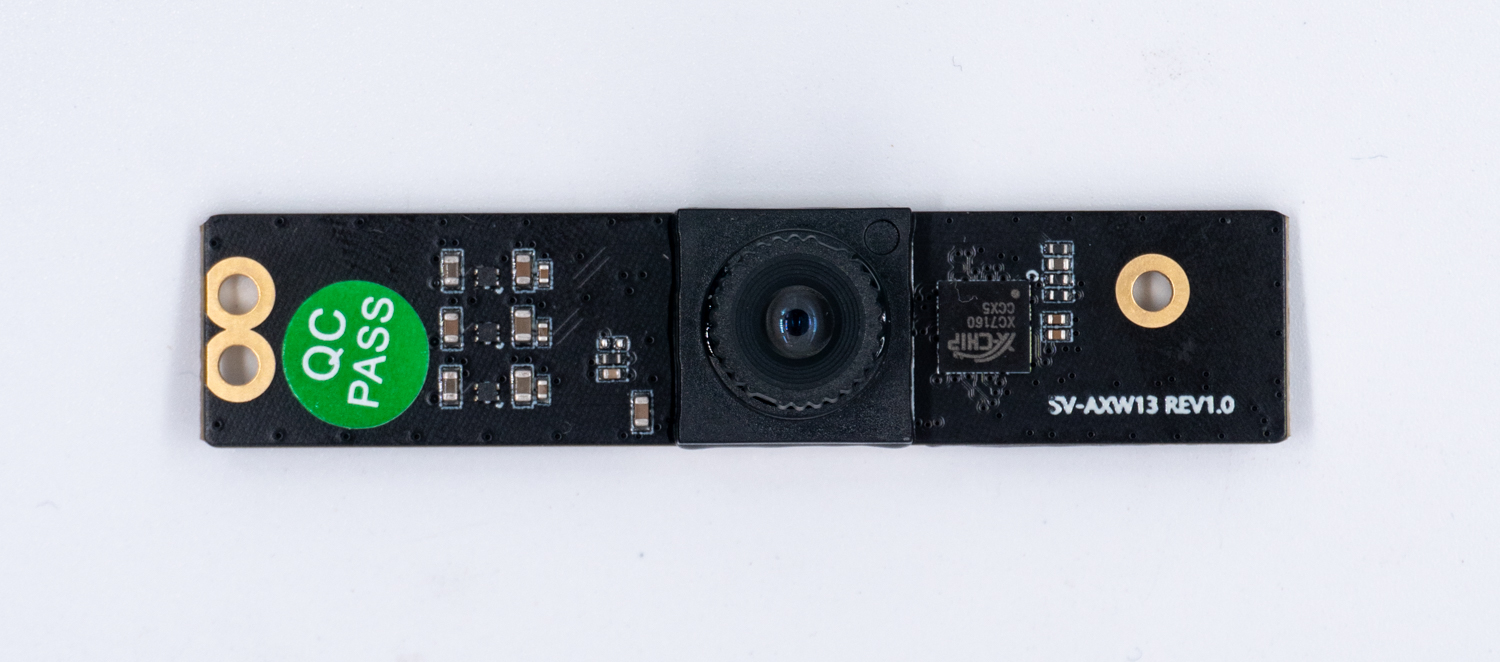
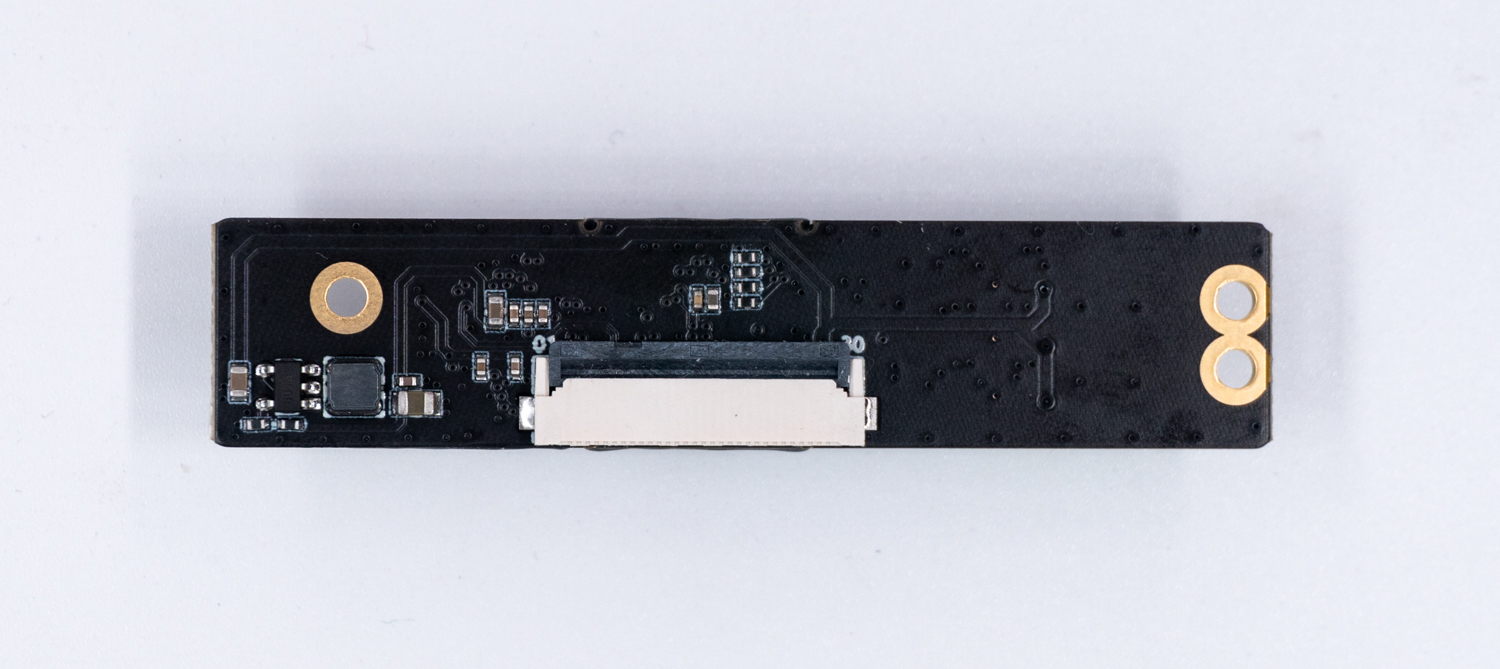
3.1. CAM-8MS1M 单目摄像头模组
3.1.1. 产品参数
-
品牌:SV
-
ISP:xc7160
-
Sensor: sc8238
-
接口: MIPI
-
像素: 800W(当前仅支持1080P,4K仍在适配中)
3.1.2. 规格书
3.1.4. 实物图参考
3.1.5. 连接方法

3.1.6. 实拍图片

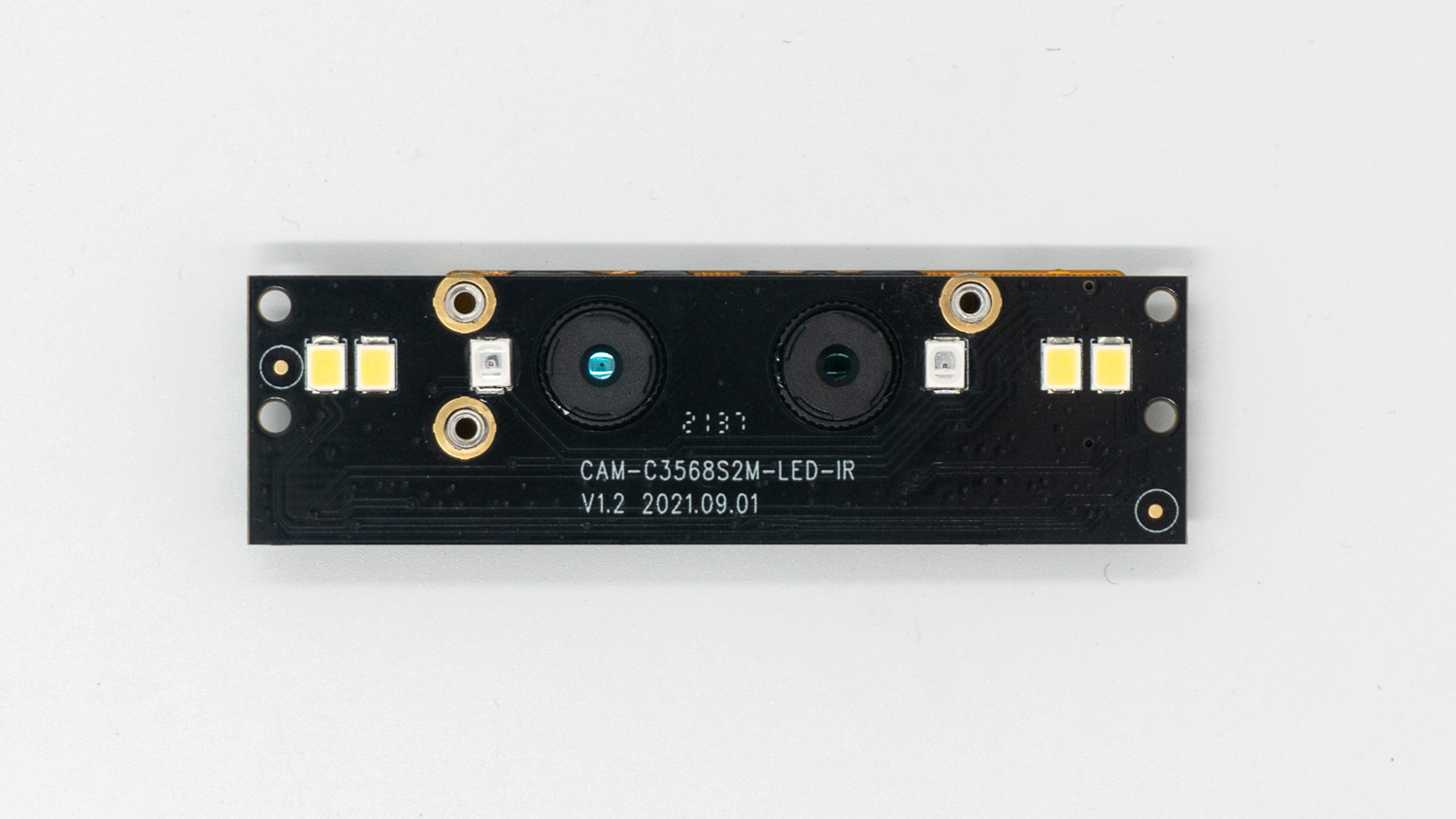
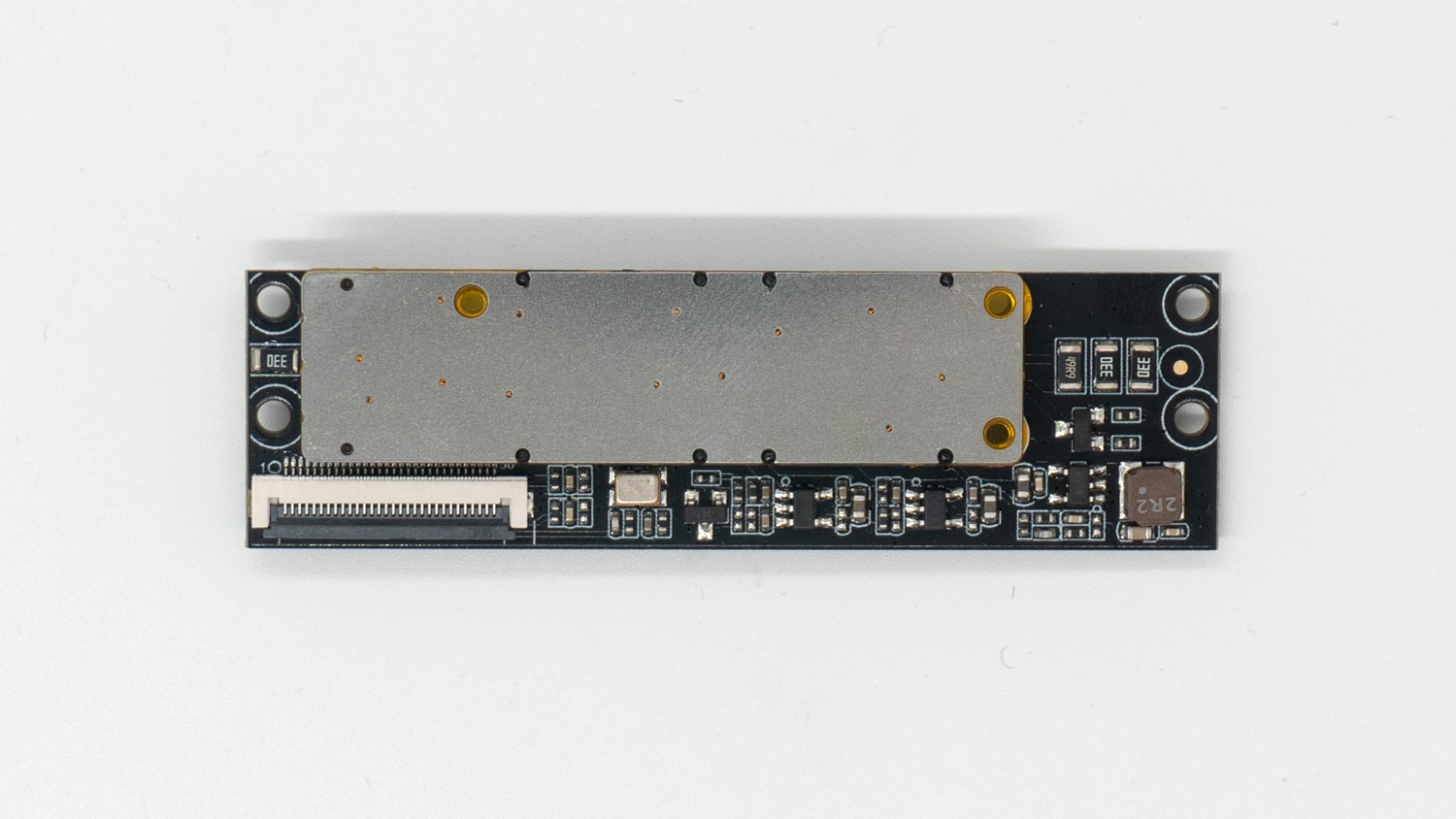
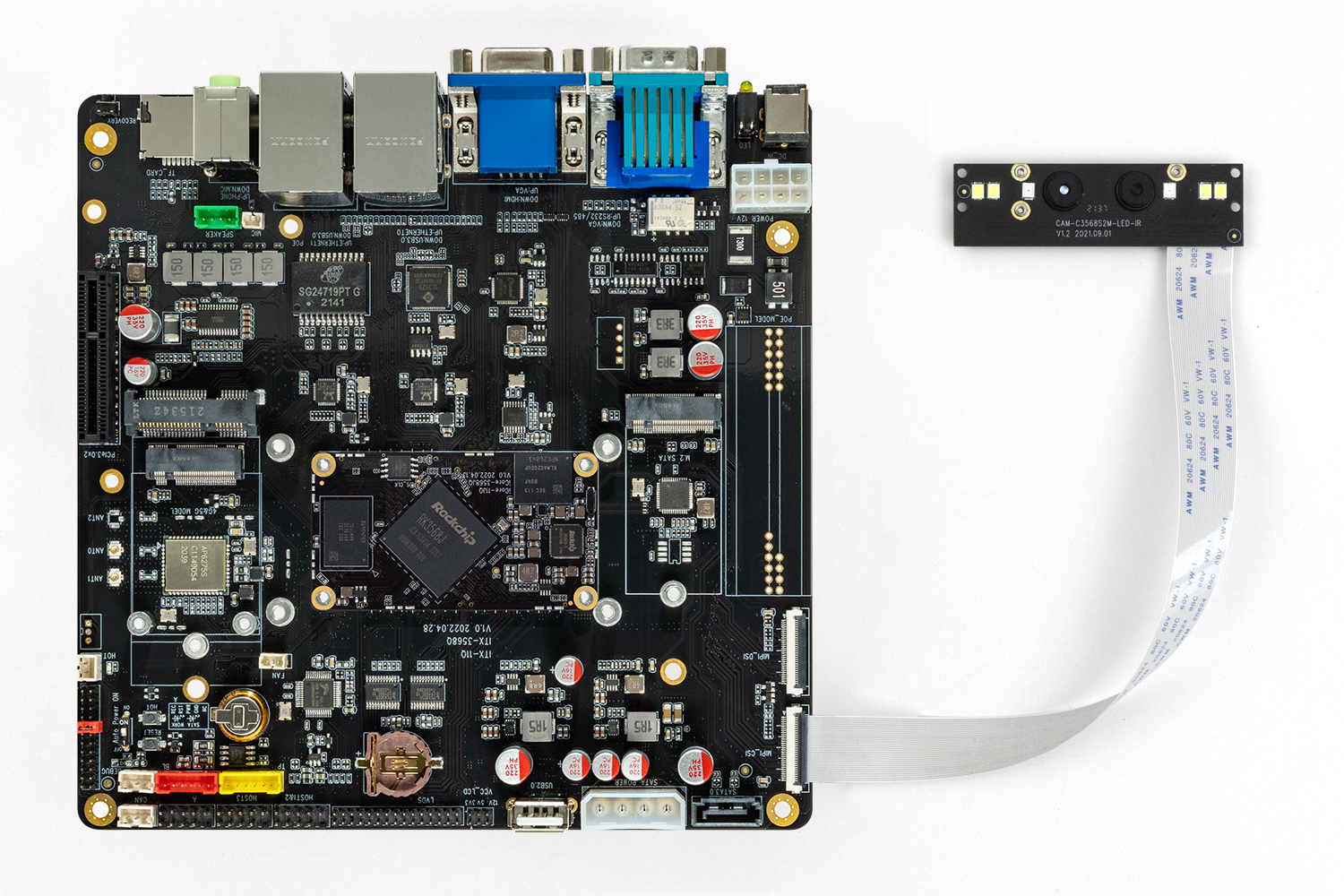
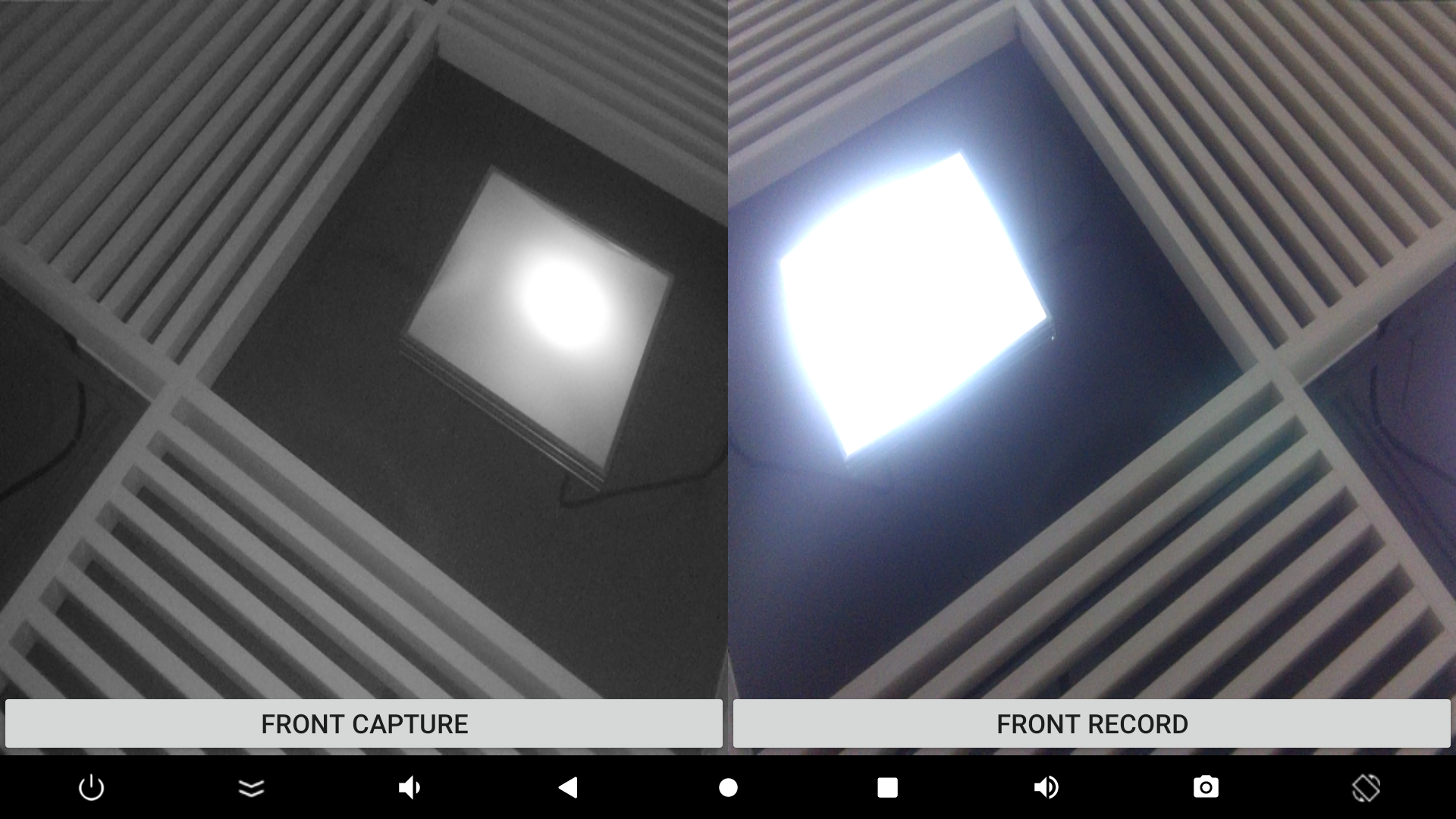
3.2. CAM-2MS2MF 双目摄像头模组
3.2.1. 产品参数
-
品牌:SV
-
Sensor: gc2053(IR)/gc2093(RGB)
-
接口: MIPI
-
像素: 200W
3.2.2. 规格书
3.2.4. 实物图参考
3.2.5. 连接方法
3.2.6. 实拍图片
4. 无线模块
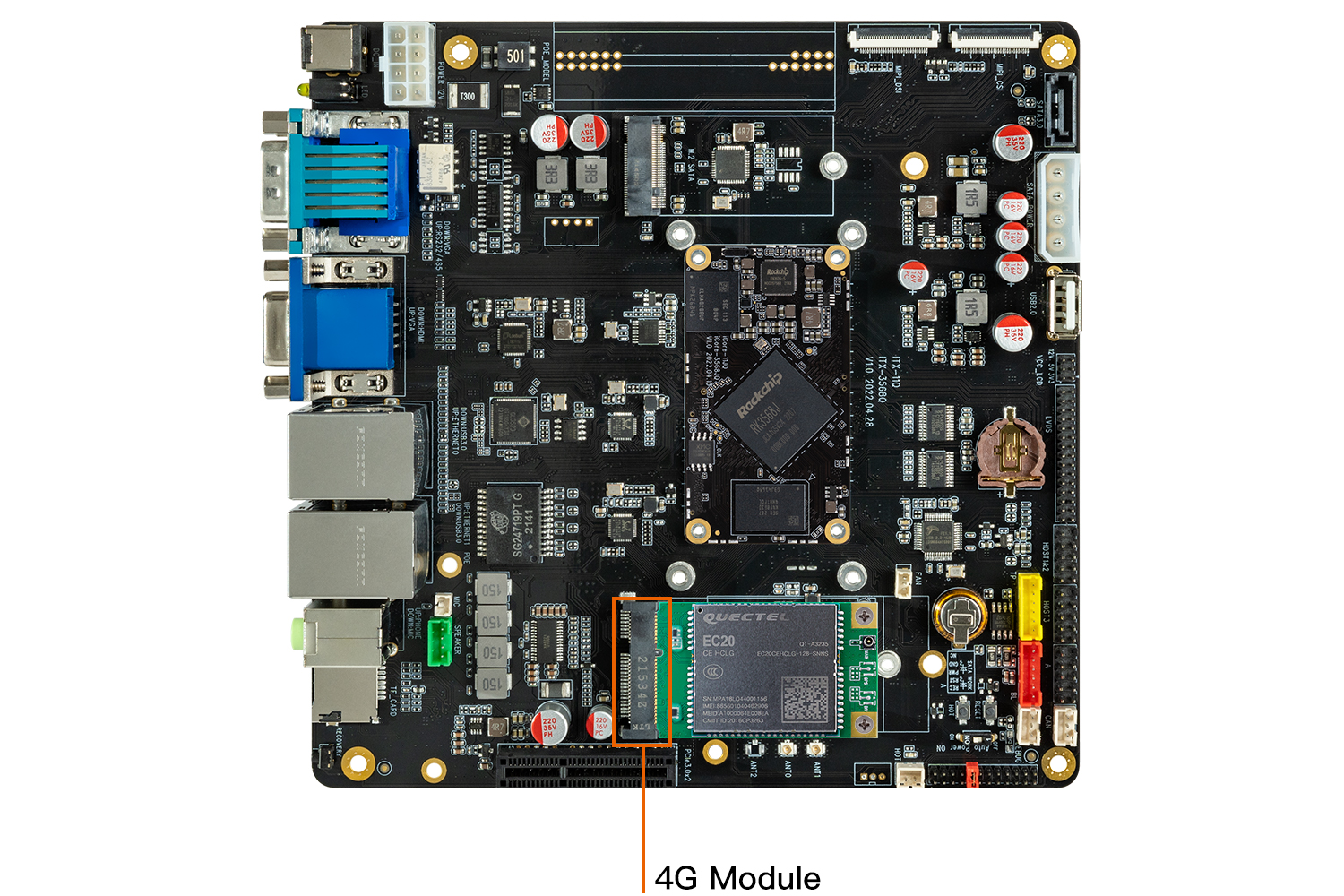
4.1. EC20 4G模组套件
4.1.1. 产品参数
-
型号
-
EC20-C R2.0 Mini PCIe-C
-
-
电源电压
-
3.3V~ 3.6V, 典型值: 3.3V
-
-
工作频段
-
TDD-LTE: B38/B39/B40/B41
-
FDD-LTE: B1/B3/B8
-
WCDMA: B1/B8
-
TD-SCDMA: B34/B39
-
GSM: 900/1800 MHz
-
-
数据传输
-
TDD-LTE: Max 130Mbps (DL) Max 35Mbps (UL)
-
FDD-LTE: Max 150Mbps (DL) Max 50Mbps (UL)
-
DC-HSPA : Max 42Mbps (DL) Max 5.76Mbps (UL)
-
UMTS: Max 384Kbps (DL) Max 384Kbps (UL)
-
TD-SCDMA: Max 4.2Mbps (DL) Max 2.2Mbps (UL)
-
CDMA: Max 3.1Mbps (DL) Max 1.8Mbps (UL)
-
EDGE: Max 236.8Kbps (DL) Max 236.8Kbps (UL)
-
GPRS: Max 85.6Kbps (DL) Max 85.6Kbps (UL)
-
-
接口连接器
-
USB:USB 2.0 高速接口, 480Mbps
-
数字语音:1个数字语音接口 (可选)
-
USIM:1.8V/3V
-
网络指示:×2, NET_STATUS 和 NET_MODE
-
UART:×1 UART
-
复位:低电平
-
PWRKEY:低电平
-
天线接口:×3 (主天线, 分集天线和GNSS天线接口)
-
ADC:×2
-
-
结构尺寸
-
51.0mm × 30.0mm × 4.9mm
-
-
重量
-
约 10.5g
-
-
认证
-
CCC/ NAL*/ TA
-
4.1.2. GNSS 功能
EC20 模组分带GNSS和不带GNSS两种,Firefly官网售卖的EC20 4G模组是不支持GNSS的,后缀为SNNS,支持GNSS功能的EC20 模组一般带有后缀SGNS,公版固件支持GNSS功能,但是默认关闭,使用方法可参考EC20 GNSS功能章节。
4.1.3. 实物图

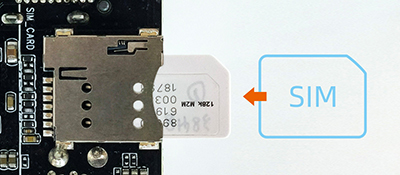
4.1.4. 连接方法
-
USB 接口连接

-
Mini-PCIe 接口连接
-
SIM 卡连接
4.2. EC200T 4G模组套件
4.2.1. 产品参数
-
型号
-
EC200T-CN Mini PCIe-D
-
-
电源电压
-
3.4V~ 4.3V, 典型值: 3.8V
-
-
工作频段
-
TDD-LTE: B34/B38/B39/B40/B41
-
FDD-LTE: B1/B3/B5/B8
-
WCDMA: B1/B5/B8
-
GSM: 900/1800 MHz
-
-
数据传输
-
TDD-LTE: Max 120Mbps (DL) Max 3Mbps (UL)
-
FDD-LTE: Max 150Mbps (DL) Max 50Mbps (UL)
-
DC-HSDPA: Max 21Mbps (DL)
-
HSDPA: Max 5.76 Mbps (UL)
-
WCDMA: Max 384Kbps (DL) Max 384Kbps (UL)
-
EDGE: Max 236.8Kbps (DL) Max 236.8Kbps (UL)
-
GPRS: Max 85.6Kbps (DL) Max 85.6Kbps (UL)
-
-
接口连接器
-
USB:USB 2.0 高速接口, 480Mbps
-
数字语音:1个数字语音接口 (可选)
-
USIM:1.8V/3V
-
UART:×1 UART
-
UART_DTR (睡眠控制)
-
W_DISABLE# (飞行模式控制)
-
LED_WWAN# (网络状态指示)
-
PERST# (模块复位)
-
RI (主机唤醒)
-
WAKEUP_IN (睡眠控制,低电平有效)
-
WAKEUP_OUT (睡眠状态指示)
-
天线接口:×2 (主天线, 分集天线)
-
-
结构尺寸
-
51.0mm × 30.0mm × 4.9mm
-
-
重量
-
约 10.2g
-
-
认证
-
CCC/SRRC/NAL
-
4.2.2. 实物图

4.2.3. 连接方法
4.3. RM500Q-GL 5G模组套件
4.3.1. 产品参数
-
型号
-
RM500QGLAB-M20-SGASA
-
-
电源电压
-
3.135~4.4 V , 典型值: 3.7V
-
-
发射功率
-
WCDMA 频段:Class 3(24 dBm 1/-3 dB)
-
LTE 频段:Class 3(23 dBm ±2 dB)
-
5G NR 频段:Class 3(23 dBm ±2 dB)
-
LTE B38/B40/B41/B42/B43 频段 HPUE:Class 2(26 dBm ±2 dB)
-
5G NR n41/n77/n78/n79 bands HPUE:Class 2(26 dBm 2/-3 dB)
-
-
5G NR 特性
-
支持 3GPP Release 15
-
调制方式:
-
256QAM (UL)
-
256QAM (DL)
-
-
SCS 支持 15 kHz 和 30 kHz
-
正在开发的 5G NR 频段最大带宽支持 20MHz
-
5G NR n41/n77/n78/n79 最大带宽支持 100 MHz
-
支持 Option 3x、3a 和 Option 2
-
NSA TDD:Max 2.5 Gbps (DL) Max 650 Mbps (UL)
-
SA TDD: Max 2.1 Gbps (DL) Max 900 Mbps (UL)
-
n41/n77/n78/n79 频段支持上行 2 × 2 MIMO
-
n1/n2/n3/n7/25/n38/n40/n41/n48/n66/n77/n78/n79 频段支持下行 4 × 4 MIMO
-
支持 SA 和 NSA 组网模式,所有 5G 频段均支持 SA,n38*/n41/n77/n78/n79 频段支持 NSA
-
-
LTE 特性
-
最大支持 CA Cat 16 FDD 和 TDD
-
调制方式:
-
(UL) QPSK、16QAM、64QAM、256QAM*
-
(DL) QPSK、16QAM、64QAM、256QAM
-
-
支持 1.4~20 MHz(3 × CA)射频带宽
-
LTE: Max 1.0 Gbps (DL) Max 200 Mbps (UL)
-
B1/B2/B3/B4/B7/B25/B30/B38/B39/B40/B41/B42/B43/B48/B66 频段支持下行 4 × 4 MIMO
-
-
UMTS 特性
-
支持 QPSK、16QAM 和 64QAM 调制
-
DC-HSDPA:Max 42 Mbps (DL)
-
HSUPA:Max 5.76 Mbps (UL)
-
WCDMA:Max (DL/UL) 384 kbps
-
支持 3GPP R8 DC-HSDPA、HSPA 、HSDPA、HSUPA 和 WCDMA
-
-
接口
-
USB 接口:符合 USB 3.1 和 USB 2.0 规范
-
(U)SIM 接口:支持Class B(3.0 V)和 Class C(1.8 V)
-
分集接收天线接口:支持 5G NR/LTE/WCDMA 分集接收
-
PCIE接口:符合 PCIe Gen3 规范,每个通道传输速率可达 8 Gbps
-
天线接口:×4 (ANT0、ANT1、ANT2_GNSSL1 和 ANT3 四个天线接口 )
-
-
网络协议特性
-
支持 QMI/NTP*协议
-
支持 PAP 和 EIRP 协议,通常用于 PPP 连接
-
-
内置GNSS
-
支持GPS、GLONASS、BeiDou、Galileo和QZSS
-
-
结构尺寸
-
(52.0 ±0.15) mm × (30.0 ±0.15) mm × (2.3 ±0.2) mm
-
-
重量
-
约 8.6g
-
-
RoHS
-
符合 EU RoHS 标准
-
注意:* 表示移远官方正在开发中
4.3.2. 实物图

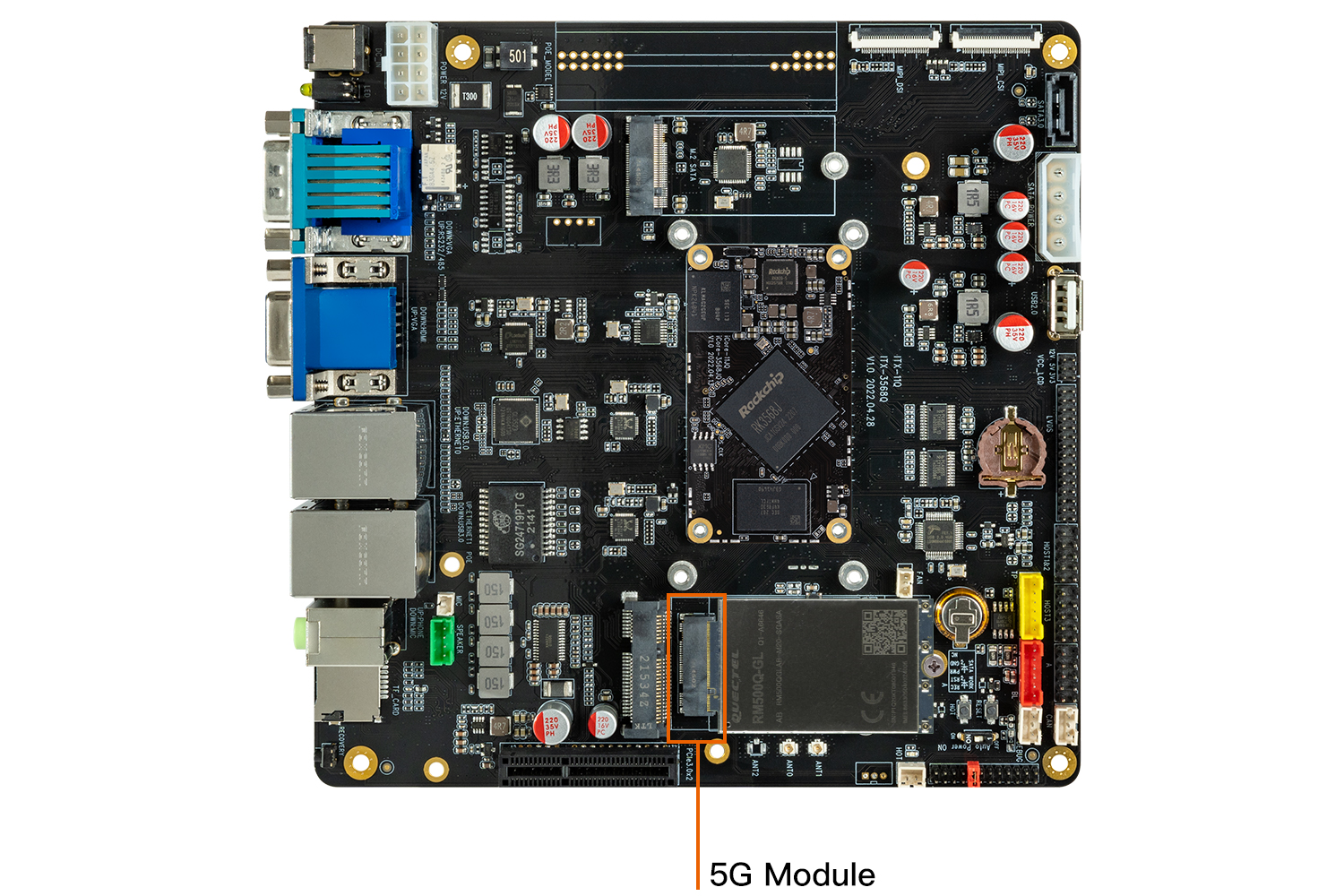
4.3.4. 参考固件
公版固件默认支持 EC20 4G 模组、EC200T 4G模组 、RM500Q-GL 5G模组
4.4. GNSS 模块
4.4.1. DELINCOMM 系列

4.4.1.2. 接口定义
VCC (红线)、GND (黑线)、TX (白线)、RX(绿线)
4.4.1.3. 使用说明
4.4.1.3.1. 硬件连接
-
将模组的VCC、GND、TX、RX分别接到ITX-3568Q UART9(对应节点为/dev/ttyS9)的3.3V、GND、RX、TX,注意避免接错VCC、GND、TX、RX导致烧坏模组
-
对于UART的一些定义和说明可以参考Wiki教程《UART 使用》
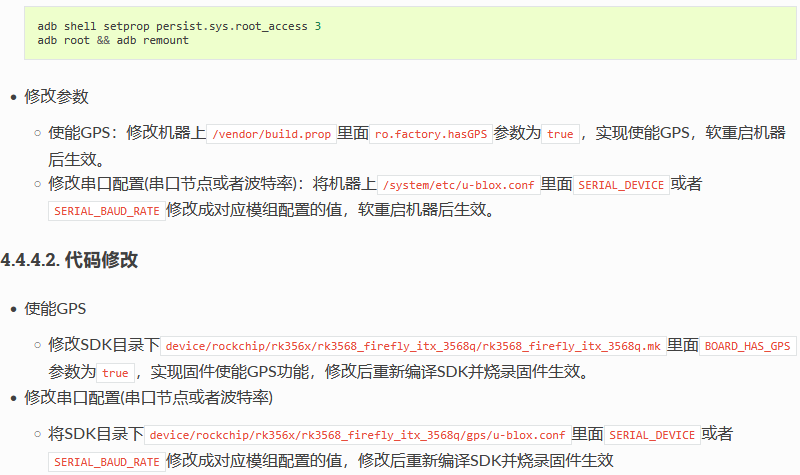
4.4.1.3.2. 软件配置
DELINCOMM系列串口波特率配置为9600,公版固件已经默认配置好,使能GPS后即可使用,详情可以参考如何使能GPS和修改串口配置。
注意:GPS功能会占用到 UART9,若需要用 UART9 作为其他用途,需要将GPS先禁止掉
4.4.2. DK2635U7F 模块
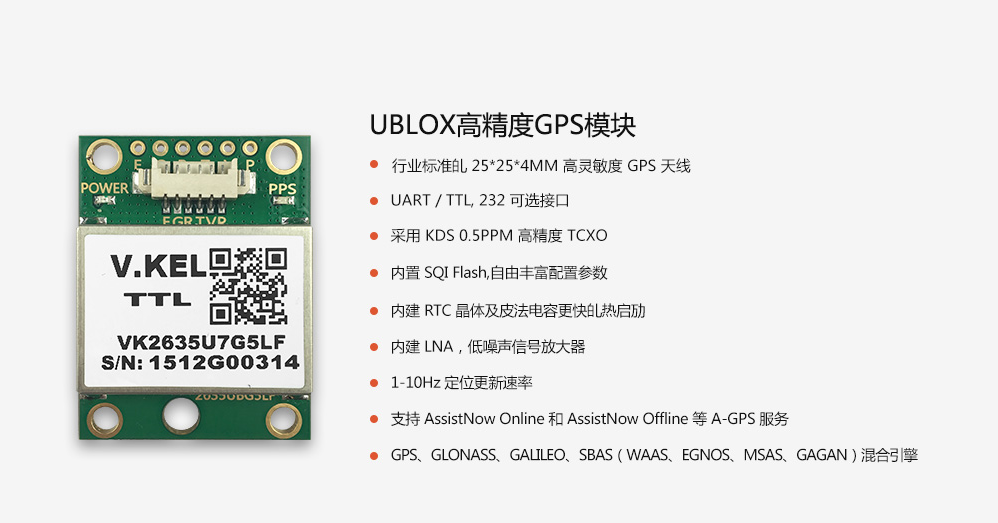
4.4.2.2. 接口定义
VCC (白线)、GND (黑线)、TX (蓝线)、RX(绿线)
4.4.2.3. 使用说明
4.4.2.3.1. 硬件连接
-
将模组的VCC、GND、TX、RX分别接到ITX-3568Q UART9(对应节点为/dev/ttyS9)的3.3V、GND、RX、TX,注意避免接错VCC、GND、TX、RX导致烧坏模组
-
对于UART的一些定义和说明可以参考Wiki教程《UART 使用》
4.4.2.3.2. 软件配置
UBLOX模块串口波特率配置为9600,公版固件已经默认配置好,使能GPS后即可使用,详情可以参考如何使能GPS和修改串口配置。
注意:GPS功能会占用到 UART9,若需要用 UART9 作为其他用途,需要将GPS先禁止掉
4.4.3. EC20 GNSS功能
EC20模组支持GPS、GLONASS、GALILEO、BEIDOU,兼容标准 NMEA 0183 协议,可通过 USB NMEA 接口输出 1Hz 频率的 NMEA 信息,默认输出串口为/dev/ttyUSB1,波特率115200 bit/s。
4.4.3.1. 天线要求
-
频率范围:1559MHz~1609MHz
-
极化:RHCP 或 Linear
-
VSWR:< 2(典型值)
-
有源天线噪声系数:< 1.5dB
-
有源天线增益:> 0dB
-
有源天线内嵌 LNA 增益:< 17dB
注意: GPS天线需要使用有源天线
4.4.3.2. 使用说明
4.4.3.2.1. 硬件连接
EC20模组根据EC20 4G模组套件章节的说明连接,天线接入带有GPS丝印的天线接口。
4.4.3.2.2. 软件配置
对于EC20模组,其GNSS 配置的串口节点和波特率分别为/dev/ttyUSB1、115200,使用模组之前需要检查/system/etc/u-blox.conf中SERIAL_DEVICE或者SERIAL_BAUD_RATE的值是否与之匹配,确认匹配则使能GPS后即可使用,使能方法参考如何使能GPS和修改串口配置。
注意:对于EC20模组,使用GNSS功能时,需要注意是否有接入其他的ttyUSB*设备,存在其他ttyUSB时,有可能会使EC20的默认ttyUSB设备号发生变化,导致GNSS功能无法使用
5. 12V电源适配器
5.1. 产品参数
-
产品:电源适配器
-
规格:美规/欧规
-
输入标准:AC110-240V 50/60Hz
-
输出标准:12V-2A
注意: iCore-3568JQ 一体机正常工作需要电源 12V/2A,电流低于 2A 可能会因电流过小而异常重启,为了保证开发板的正常工作,请使用电压为 12V,电流为 2A~3A 的电源,推荐使用 Firefly 官网电源配件。
5.2. 实物图


其他
1. Kernel 使用
1.1. 前言
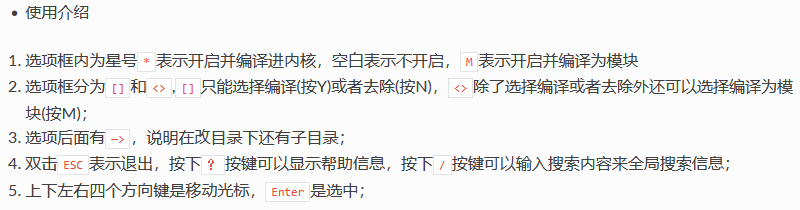
Firefly kernel 没有开启全部的内核功能选项,用户在使用官方默认固件发现内核不满足使用场景时,比如 USB CAN 相关功能,则需要自行开启并重新编译、烧录内核。下面介绍方法:
1.2. 定制
首先需要获取 SDK ,开发环境的准备和获取方法查看:
之后开始新增内核选项:
-
首先进入 SDK/kernel 文件夹,将配置文件写入 .config :
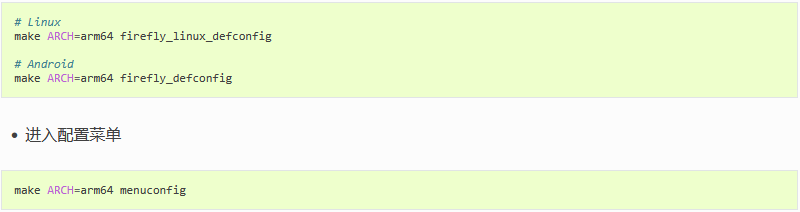
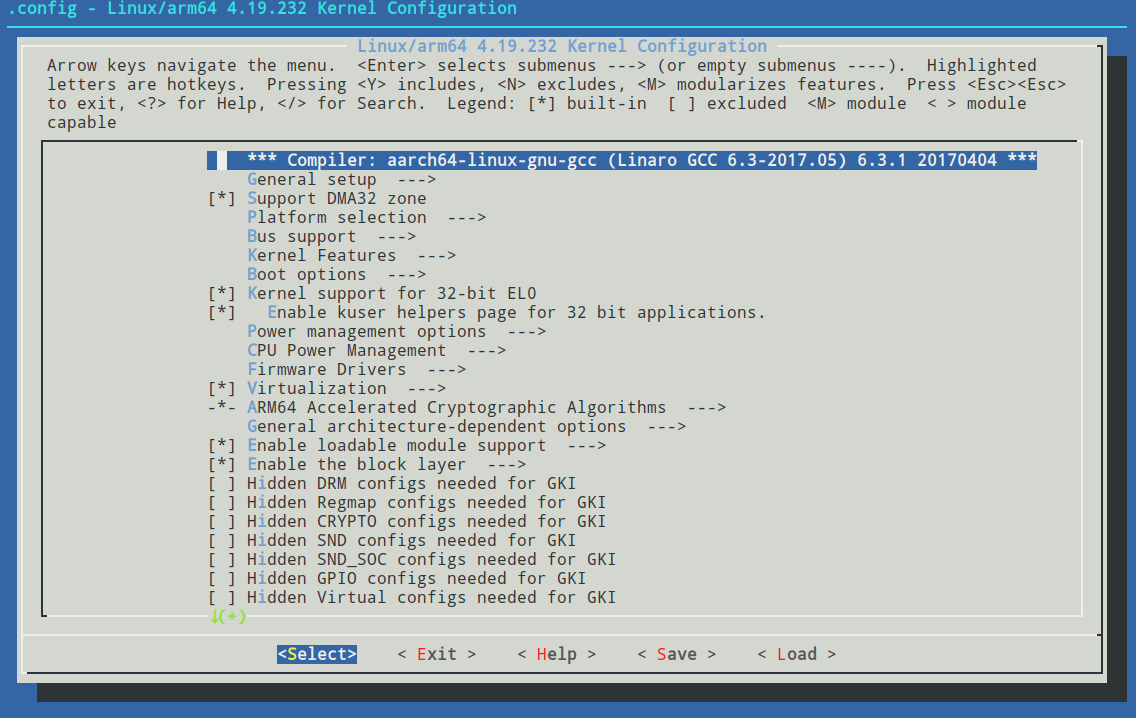
之后会进入一个图形化界面进行配置
-
注意事项
选择编译为模块(M)需要后续进行安装才能正常使用,所以添加少量配置建议使用编译进内核方式(Y),省去安装步骤
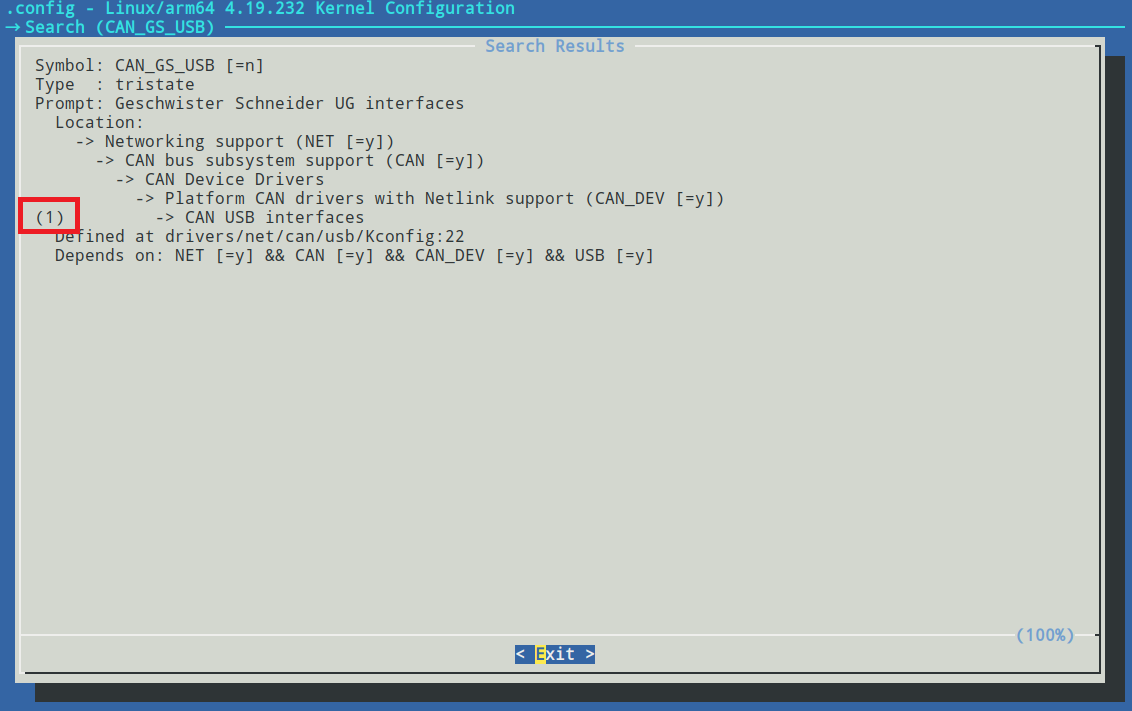
搜索结果中按下最左侧显示的数字,可以直接前往这个配置项所在位置:
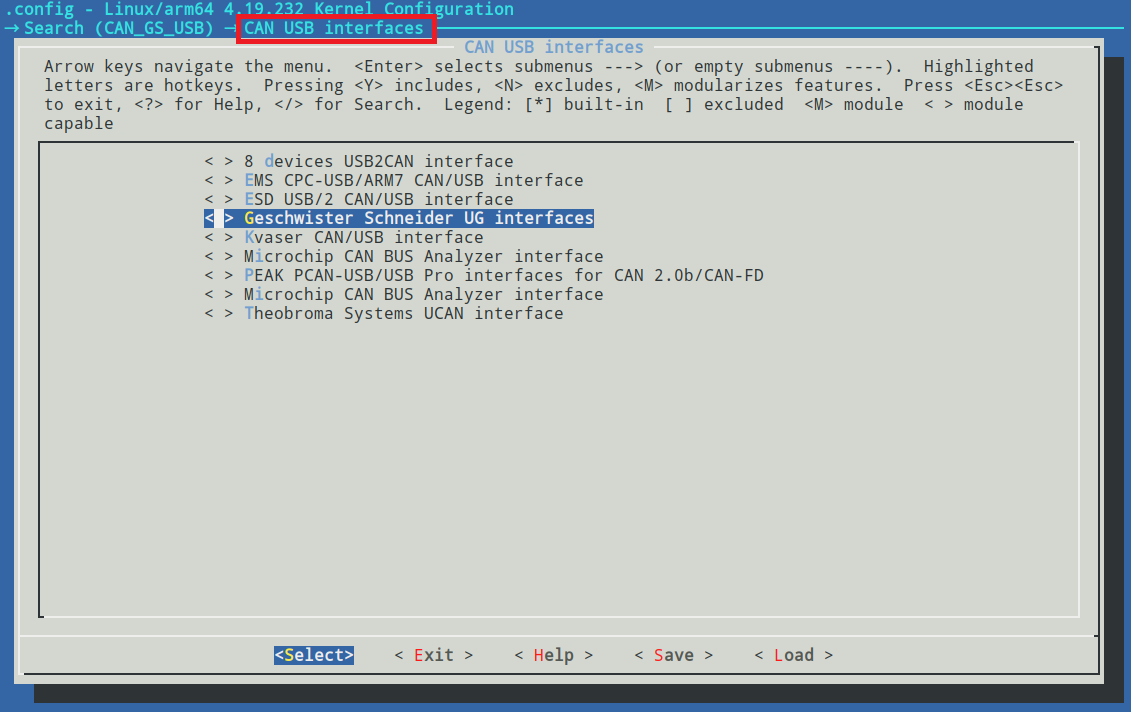
属于同一个组的多个选项建议全部打开,例如下图中所有选项都属于 CAN USB 接口支持,可以全部打开以获得完整支持

1.4. 烧录
参考分区烧写
2. U-Boot 使用
2.1. 前言
RK U-Boot 基于开源的 U-Boot 进行开发,工作模式有启动加载模式和下载模式。启动加载模式是 U-Boot 的正常工作模式,嵌入式产品发布时,U-Boot 都工作在此模式下,主要用于开机时把存储器中的内核加载到内存中,启动操作系统;下载模式主要用于将固件下载到存储器,开机时长按 Recovery 键可进入下载模式。本文简单说明 U-Boot 的使用,详细请参考Uboot开发
2.2. 编译
编译 U-Boot 与编译内核类似,编译前把默认配置写入 .config,执行:

2.3. 烧录
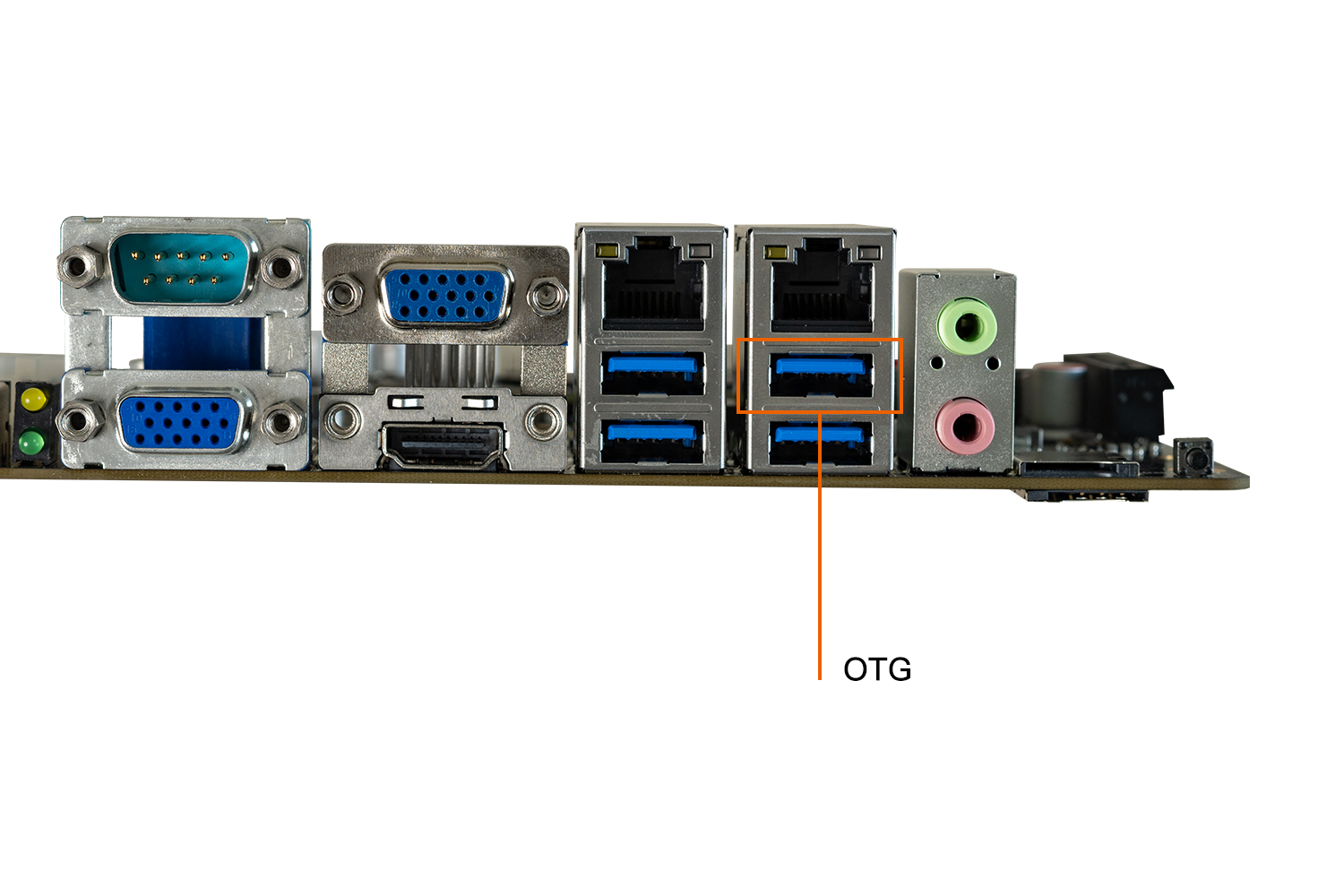
打开烧录工具,板子接好 USB OTG 线,接通电源时按住 Recovery 键,使开发板进入 U-Boot 的下载模式,在烧录工具中选择编译好的 Loader 文件,点击执行即可,如下图:
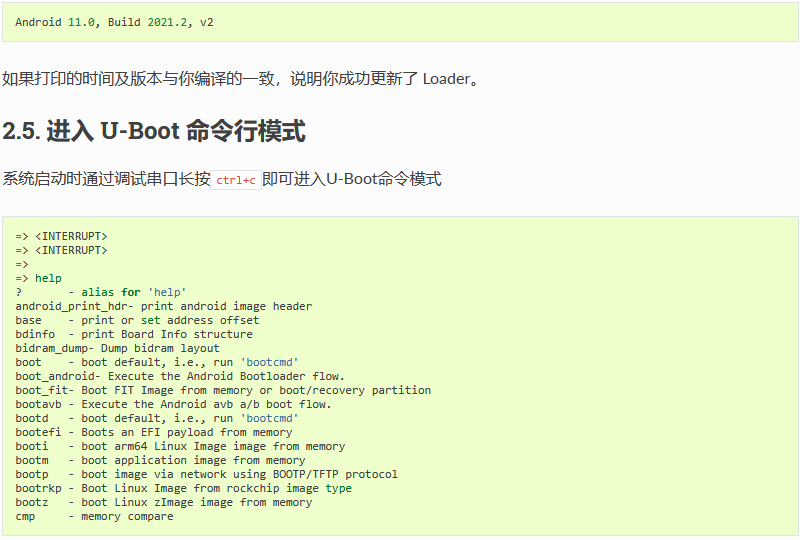
2.4. 确认是否正确烧写新的 Loader
如果你已经成功烧写你最新编译的 Loader,在开机的串口输出中可以看到类似如下信息:
2.6. 二级 Loader
RK3568 使用二级 Loader,编译生成的镜像为:

3. NPU使用
RK3568 内置 NPU 模块, 处理性能最高可达1TOPS。使用该NPU需要下载RKNN SDK,RKNN SDK 为带有 NPU 的 RK 系列芯片提供编程接口,能够帮助用户部署使用 RKNN-Toolkit2 导出的 RKNN 模型,加速 AI 应用的落地,具体支持平台列表可通过 SDK 中 README 文档或者访问airockchip 查看,开发建议以airockchip官方更新版本作为参考。
3.1. RKNN 模型
RKNN 是 Rockchip NPU 平台使用的模型类型,以.rknn后缀结尾的模型文件。用户可以通过RKNN SDK提供的工具将自主研发的算法模型转换成 RKNN 模型
RKNN 模型可以直接运行在 RK3568 平台上,在rknpu2/examples中有例子,根据README.md编译生成 Android 或 Linux Demo(需要交叉编译环境)。也可以直接下载编译好的 Demo。
在 ITX-3568Q 上运行yolov5 demo如下:
# Platform 为芯片平台,如RK3576,RK3588, RK3566_RK3568等
:/ # cd /data/rknn_yolov5_demo_Android (Linux 系统使用 rknn_yolov5_demo_Linux 即可)
:/data/rknn_yolov5_demo_Android # chmod 777 rknn_yolov5_demo
:/data/rknn_yolov5_demo_Android # export LD_LIBRARY_PATH=./lib
:/data/rknn_yolov5_demo_Android # ./rknn_yolov5_demo model/Platform/yolov5s-640-640.rknn ./model/bus.jpg resize ./out.jpg
post process config: box_conf_threshold = 0.25, nms_threshold = 0.45
Loading mode...
sdk version: 2.3.0 (c949ad889d@2024-11-07T11:35:33) driver version: 0.9.3
model input num: 1, output num: 3
index=0, name=images, n_dims=4, dims=[1, 640, 640, 3], n_elems=1228800, size=1228800, w_stride = 640, size_with_stride=1228800, fmt=NHWC, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922
index=0, name=output0, n_dims=4, dims=[1, 255, 80, 80], n_elems=1632000, size=1632000, w_stride = 0, size_with_stride=1638400, fmt=NCHW, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922
index=1, name=286, n_dims=4, dims=[1, 255, 40, 40], n_elems=408000, size=408000, w_stride = 0, size_with_stride=409600, fmt=NCHW, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922
index=2, name=288, n_dims=4, dims=[1, 255, 20, 20], n_elems=102000, size=102000, w_stride = 0, size_with_stride=122880, fmt=NCHW, type=INT8, qnt_type=AFFINE, zp=-128, scale=0.003922
model is NHWC input fmt
model input height=640, width=640, channel=3
Read ./model/bus.jpg ...
img width = 640, img height = 640
once run use 67.055000 ms
loadLabelName ./model/coco_80_labels_list.txt
person @ (209 243 286 510) 0.879723
person @ (479 238 560 526) 0.870588
person @ (109 238 231 534) 0.839831
bus @ (91 129 555 464) 0.692042
person @ (79 353 121 517) 0.300961
save detect result to ./out.jpg
loop count = 10 , average run 59.530100 ms
3.2. 非 RKNN 模型
对于 Caffe、TensorFlow 等其他模型,想要在 RK3568 平台运行,需要先进行模型转换。可以使用 RKNN-Toolkit2 工具将模型转换成 RKNN 格式。
3.3. RKNN-Toolkit2工具
3.3.1. 工具介绍
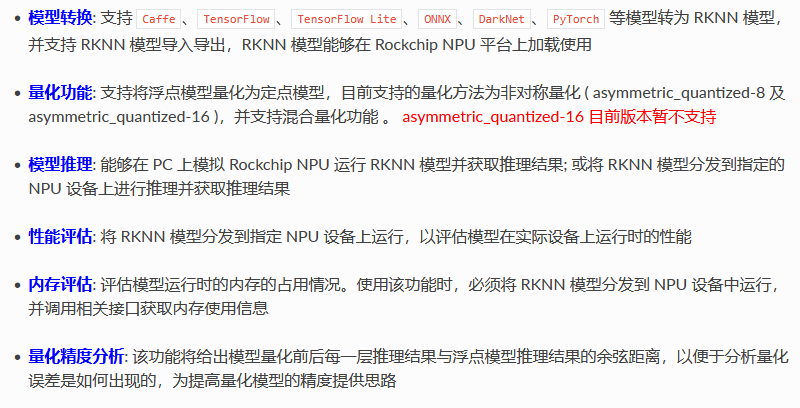
RKNN-Toolkit2 是为用户提供在 PC、Rockchip NPU 平台上进行模型转换、推理和性能评估的开发套件,用户通过该工具提供的 Python 接口可以便捷地完成各种操作。
工具的全部功能简单介绍如下:
3.3.2. 环境依赖

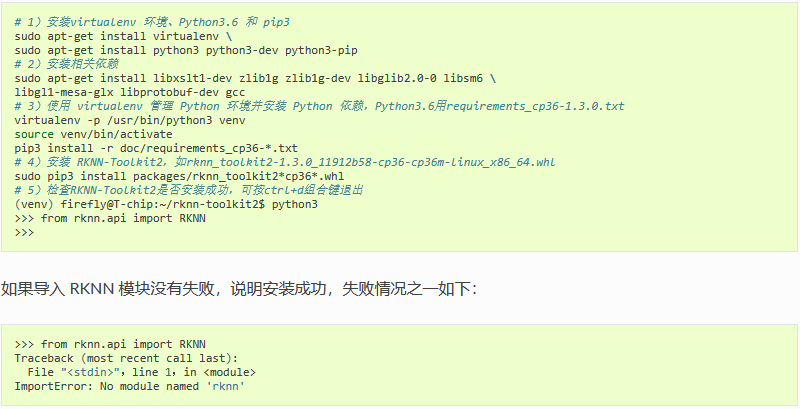
3.3.3. RKNN-Toolkit2 安装
建议使用 virtualenv 管理 Python 环境,因为系统中可能同时有多个版本的 Python 环境,以 Python3.6 为例
3.3.4. 模型转换 Demo
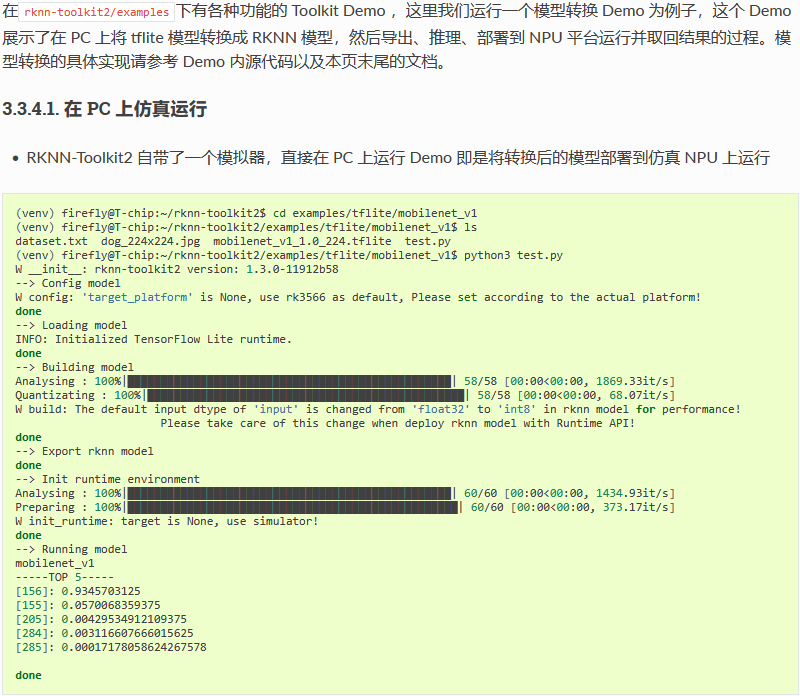
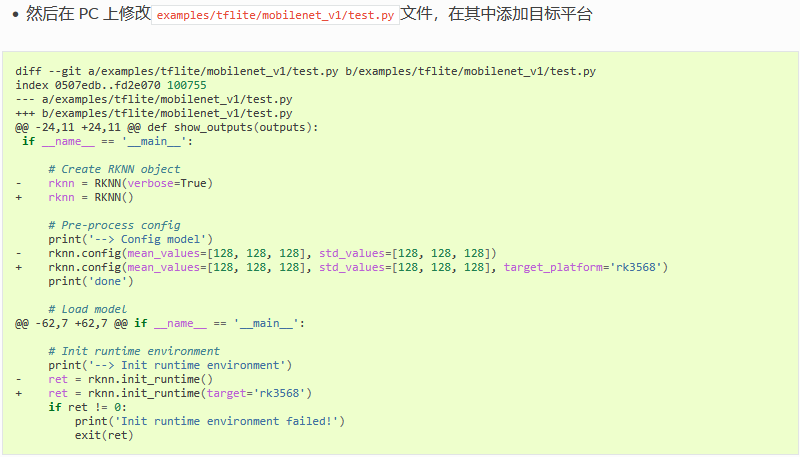
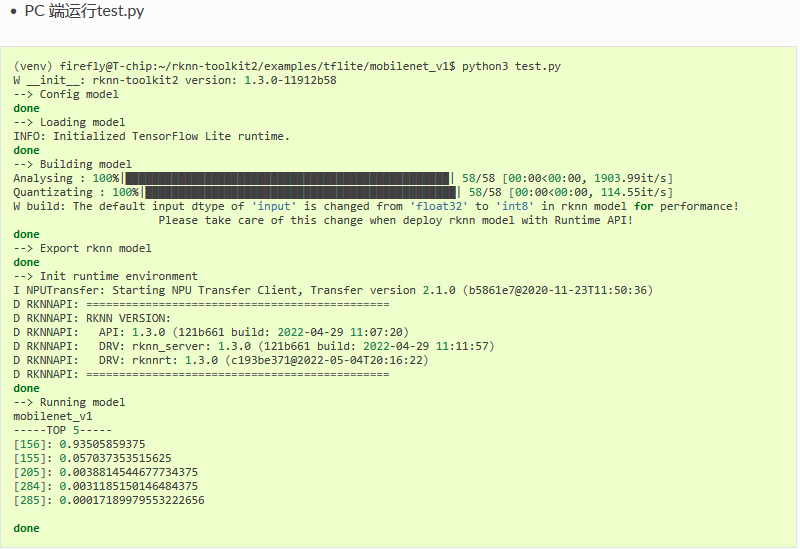
3.3.4.2. 运行在与 PC 相连的 ITX-3568Q NPU 平台上
RKNN-Toolkit2 通过 PC 的 USB 连接到 OTG 设备 ITX-3568Q。RKNN-Toolkit2 将 RKNN 模型传到 ITX-3568Q 的 NPU 上运行,再从 ITX-3568Q 上获取推理结果、性能信息等:

3.3.5. 其他 Toolkit Demo
其他 Toolkit Demo 可以在rknn-toolkit2/examples/下找到,例如量化、精度评估等。具体实现以及使用方法请参考 Demo 内源代码以及详细开发文档。
3.4. 详细开发文档
ITX-3568Q NPU 及 Toolkit 详细使用方法请参考RKNN SDK下《Rockchip_RKNPU_User_Guide_RKNN_API_*.pdf》、《Rockchip_User_Guide_RKNN_Toolkit2_*.pdf》文档。
常见问题解答
1. FAQs
1.1. kernel 编译弹出 “IO-Domain Checklist” 对话框
kernel 新建了 dts 文件 arch/arm64/boot/dts/rockchip/rk3568-firefly-itx-3568q-DEMO.dts,编译 kernel 时弹出如下对话框
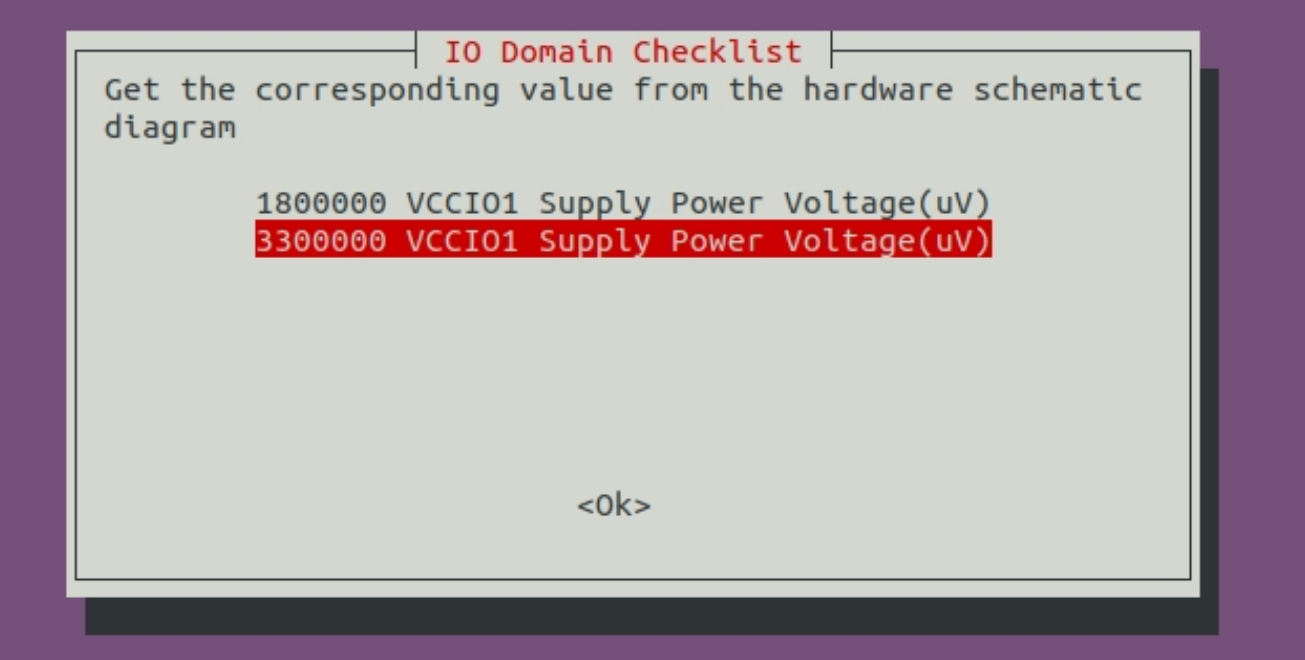
先进行如下操作,再编译 kernel 。
cp arch/arm64/boot/dts/rockchip/.rk3568-firefly-itx-3568q.dtb.dts.tmp.domain arch/arm64/boot/dts/rockchip/.rk3568-firefly-itx-3568q-DEMO.dtb.dts.tmp.domain
切记:不要轻易修改主控电源域的IO电平,否则,最坏的情况可能会导致IO的损坏。
1.2. 修改 kernel/buildroot 等配置后编译烧录发现不生效

1.4. 3.5mm耳机座子接国标耳机有异常?
目前iCore-3568JQ仅支持美标类型(CTIA)的耳机,对于国标类型(OMTP)的耳机硬件不兼容,会出现左右声道同时存在双声道的现象。
1.5. 开机异常并循环重启怎么办?
有可能是电源电流不够,请使用电压为 12V,电流为 2.5A~3A 的电源。
1.6. Ubuntu 默认的用户名和密码是什么?
-
用户名:firefly
-
密码:firefly
-
切换超级用户 sudo -s
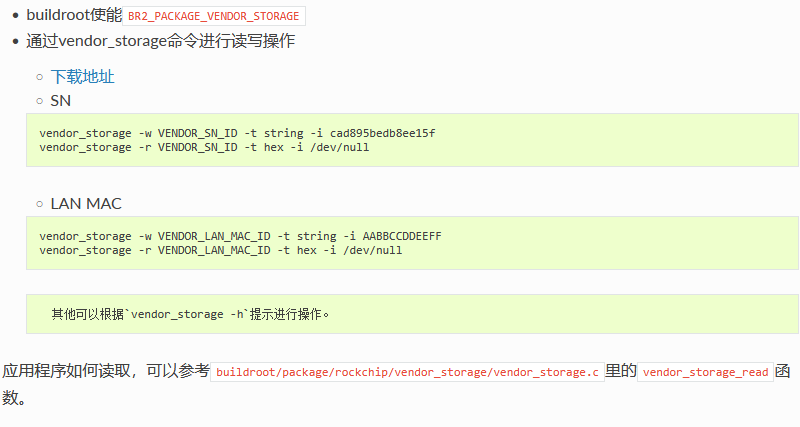
1.7. 写号工具写入SN,MAC地址
注意:如果开发板进行了eMMC擦除操作,之前写入的数据也会被清除。
1.7.1. Windows方式
-
安装RKDevInfoWriteTool
-
RKDevInfoWriteTool的设置里选中”RPMB”
-
根据需要在RKDevInfoWriteTool的设置里配置”SN”,”WIFI MAC”,”LAN MAC”,”BT MAC”等
-
开发板进入loader模式
-
RKDevInfoWriteTool进行写入或者读取操作
具体操作可以参考RKDevInfoWriteTool安装目录下的《RKDevInfoWriteTool使用指南》PDF文档。
1.7.2. Linux方式
开发板自身写号方式
1.8. Ubuntu系统,如果插入耳机后,没有声音,该如何处理?

参考资料
1. 接口定义
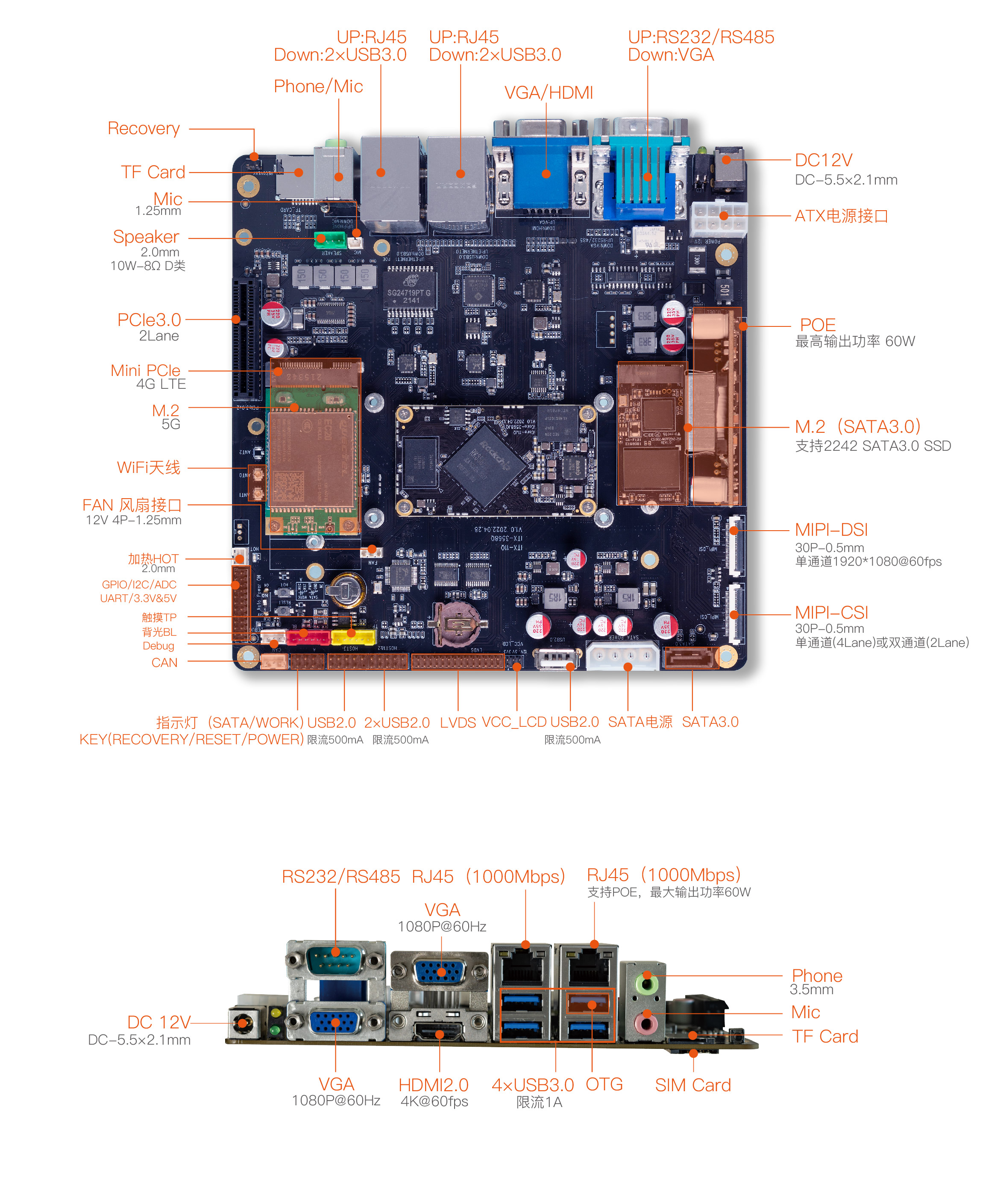
1.1. 整机接口定义
ITX-3568Q 提供了丰富的接口,主要包括:
-
12V 电源接口
-
4 x USB3.0(otg×1,host×3)
-
4 x USB2.0(接口×1,座子×3)
-
HDMI
-
VGA
-
MIPI 屏幕接口
-
LVDS 屏接口
-
以太网
-
MIC 接口
-
3.5mm 耳机接口
-
TF 卡槽
-
SIM 卡槽
-
SATA 3.0 接口
-
风扇接口
-
喇叭接口
-
Power 按键(座子)
-
Reset 按键
-
Recovery 按键
-
调试串口
-
工业级串口(RS485, RS232, TTL)
-
扩展口(ADC,I2C,GPIO)
-
MIPI 摄像头接口
-
MINI-PCIE(4G LTE)
-
M.2(5G LTE)
-
PCIe 3.0 接口
-
M.2 SATA 3.0 接口
-
CAN/CANFD
具体如下图:
资源下载

电话咨询

微信咨询

留言